ഇന്ത്യയിൽ നിന്നും ചുറ്റുമുള്ള പുസ്തകങ്ങളുടെയും ഓഡിയോ, വീഡിയോ, മറ്റ് വസ്തുക്കളുടെയും ഈ ലൈബ്രറി പബ്ലിക് റിസോഴ്സ് ക്യൂറേറ്റ് ചെയ്യുകയും പരിപാലിക്കുകയും ചെയ്യുന്നു. ഈ ലൈബ്രറിയുടെ ഉദ്ദേശ്യം ഇന്ത്യയിലെ വിദ്യാർത്ഥികളെയും ആജീവനാന്ത പഠിതാക്കളെയും ഒരു വിദ്യാഭ്യാസത്തിനായി സഹായിക്കുക എന്നതാണ്, അതിലൂടെ അവർക്ക് അവരുടെ പദവിയും അവസരങ്ങളും മികച്ചതാക്കാനും തങ്ങൾക്കും മറ്റുള്ളവർക്കും നീതി, സാമൂഹിക, സാമ്പത്തിക, രാഷ്ട്രീയ സുരക്ഷിതത്വം നേടാനും കഴിയും.
വാണിജ്യേതര ആവശ്യങ്ങൾക്കായി ഈ ഇനം പോസ്റ്റുചെയ്തു, കൂടാതെ ഗവേഷണമുൾപ്പെടെയുള്ള സ്വകാര്യ ഉപയോഗത്തിനായി അക്കാദമിക്, ഗവേഷണ സാമഗ്രികളുടെ ന്യായമായ ഇടപാട് സുഗമമാക്കുന്നു, സൃഷ്ടിയുടെ വിമർശനത്തിനും അവലോകനത്തിനും അല്ലെങ്കിൽ മറ്റ് കൃതികളുടെയും അധ്യാപനത്തിൻറെയും വിദ്യാർത്ഥികളുടെയും പുനരുൽപാദനത്തിനും. ഈ മെറ്റീരിയലുകളിൽ പലതും ഇന്ത്യയിലെ ലൈബ്രറികളിൽ ലഭ്യമല്ല അല്ലെങ്കിൽ അപ്രാപ്യമാണ്, പ്രത്യേകിച്ചും ചില ദരിദ്ര സംസ്ഥാനങ്ങളിൽ, ഈ ശേഖരം അറിവിലേക്കുള്ള പ്രവേശനത്തിൽ നിലനിൽക്കുന്ന ഒരു പ്രധാന വിടവ് നികത്താൻ ശ്രമിക്കുന്നു.
ഞങ്ങൾ ക്യൂറേറ്റ് ചെയ്യുന്ന മറ്റ് ശേഖരങ്ങൾക്കും കൂടുതൽ വിവരങ്ങൾക്കും ദയവായി സന്ദർശിക്കുകഭാരത് ഏക് ഖോജ് പേജ്. ജയ് ഗ്യാൻ!
IRC: 73-1980
പ്രസിദ്ധീകരിച്ചത്
ഇന്ത്യൻ റോഡുകൾ കോൺഗ്രസ്
ജാംനഗർ ഹ House സ്, ഷാജഹാൻ റോഡ്,
ന്യൂഡൽഹി -110011
1990
വില Rs. 120 / -
(പ്ലസ് പാക്കിംഗും തപാൽ)
സവിശേഷതകളുടെ അംഗങ്ങൾ& സ്റ്റാൻഡേർഡ്സ് കമ്മറ്റി
| 1. | J.S. Marya (Chairman) |
Director General (Road Development) & Addl. Secy, to the Govt. of India, Ministry of Shipping & Transport |
| 2. | R.P. Sikka (Member-Secretary) |
Chief Engineer (Roads), Ministry of Shipping & Transport |
| 3. | Qazi Mohd. Afzal | Development Commissioner, Jammu & Kashmir |
| 4. | R.C. Arora | N.D S.E. Part I, New Delhi |
| 5. | R.T. Atre | Secretary to the Govt. of Maharashtra, PW & H Deptt. |
| 6. | M.K. Chatterjee | Chief Executive Officer, West Bengal Industrial Infrastructure Development Corpn. |
| 7. | E.C. Chandrasekharan | Chief Engineer, Pamban Bridge Project Madras |
| 8. | M.G. Dandavate | Engineer, Concrete Association of India |
| 9. | J. Datt | Chief Engineer (Retd.), Greater Kailash, New Delhi-110048 |
| 10. | Dr. M.P. Dhir | Deputy Director & Head, Roads Division, Central Road Research Institute |
| 11. | Dr. R.K. Ghosh | Deputy Director & Head, Rigid and Semi Rigid Pavements Division, Central Road Research Institute |
| 12. | B.R. Govind | Director of Designs, Engineer-in-Chief’s Branch, AHQ |
| 13. | I.C. Gupta | Engineer-in-Chief, Haryana P.W.D., B & R |
| 14. | S.A. Hoda | Project Manager-cum-Managing Director, Bihar State Bridge Construction Corporation Ltd. |
| 15. | M.B. Jayawant | Synthetic Asphalts, 24, Carter Road, Bombay-400050 |
| 16. | D.R. Kohli | Manager, Electronics Data Processing, Bharat Petroleum Corporation Ltd. |
| 17. | S.B. Kulkarni | Manager (Asphalt), Indian Oil Corporation Ltd. |
| 18. | F.K. Lauria | Addl. Chief Engineer (N.H.), Rajasthan P.W.D. |
| 19. | H.C. Malhotra | Engineer-in-Chief & Secy. to the Govt., H.P. P.W.D. |
| 20. | M.R. Malya | Development Manager, Gammon India Ltd., Bombay |
| 21. | O. Muthachen | Poomkavil House, P.O. Punalur (Kerala) |
| 22. | K. Sunder Naik | Chief Engineer (Retd.), Indranagar Bangalore |
| 23. | K.K. Nambiar | “Ramanalaya”, 11, First Crescent Park Road, Gandhinagar, Adyar, Maidras-600020 |
| 24. | T.K. Natarajan | Deputy Director & Head, Soil Mechanics Division, Central Road Research Institute |
| 25. | M.D. Patel | Secretary to the Govt. of Gujarat Buildings and Communication Department |
| 26. | Satish Prasad | Manager, Indian Oil Corporation |
| 27. | S.K. Samaddar | Chief Project Administrator, Hooghly River Bridge Commissioners, Calcutta |
| 28. | Dr. O.S. Sahgal | Principal, Punjab Engineering College, Chandigarh |
| 29. | N. Sen | Chief Engineer (Retd.), 12, Chitranjan Park, New Delhi-110019 |
| 30. | D. Ajitha Simha | Director (Civil Engineering), Indian Standards Institution |
| 31. | Maj. Genl. J.S. Soin | Director General Border Roads |
| 32. | Dr. N.S. Srinivasan | Chief Executive, National Traffic Planning & Automation Centre |
| 33. | Dr. Bh. Subbaraju | Sri Ramapuram, Bhimavaram-534202 (A.P.) |
| 34. | Prof. C.G. Swaminathan | Director, Central Road Research Institute |
| 35. | Miss P.K. Thressia | Chief Engineer (Construction), Kerala |
| 36. | The Director (Prof. G.M. Andavan) |
Highways Research Station, Madras |
റൂറൽ (നോൺ-അർബൻ) ഹൈവേകൾക്കായുള്ള ജിയോമെട്രിക് ഡിസൈൻ സ്റ്റാൻഡേർഡുകൾ
“ജ്യാമിതീയ രൂപകൽപ്പന” ഒരു ഹൈവേയുടെ ദൃശ്യ ഘടകങ്ങളുമായി ബന്ധപ്പെട്ടിരിക്കുന്നു. ശബ്ദ ജ്യാമിതീയ രൂപകൽപ്പന വാഹനങ്ങളുടെ സാമ്പത്തിക പ്രവർത്തനത്തിന് കാരണമാവുകയും സുരക്ഷ ഉറപ്പാക്കുകയും ചെയ്യുന്നു.
ഇന്ത്യൻ റോഡ്സ് കോൺഗ്രസിന്റെ സവിശേഷതകളും മാനദണ്ഡങ്ങളും സമിതി രൂപകൽപ്പനയുടെ ജ്യാമിതീയ വശങ്ങളെക്കുറിച്ച് കുറച്ച് പേപ്പറുകൾ മുമ്പ് പ്രസിദ്ധീകരിച്ചിരുന്നു. ആദ്യത്തെ പേപ്പർ: “ഹൈവേകൾക്കായുള്ള തിരശ്ചീനവും പരിവർത്തന വക്രങ്ങളും” I.R.C. 1947 ൽ ജേണൽ. ഇതിനെ തുടർന്ന് 1950 ലും 1952 ലും യഥാക്രമം “കാഴ്ച ദൂരവും ലംബ വളവുകളും” എന്ന വിഷയത്തിൽ മറ്റ് രണ്ട് പേപ്പറുകൾ. വർഷങ്ങളോളം, ഈ പേപ്പറുകൾ ഈ രാജ്യത്തെ ഹൈവേകളുടെ രൂപകൽപ്പനയ്ക്കുള്ള ഒരു വഴികാട്ടിയായി പ്രവർത്തിച്ചു. പിന്നീട്, 1966 ൽ, ഈ പേപ്പറുകളിൽ നിന്നുള്ള ചില പ്രധാന സത്തകൾ കോൺഗ്രസ് “റോഡുകളുടെ ജ്യാമിതികൾ” എന്ന പേരിൽ പ്രസിദ്ധീകരിച്ചു.
മെട്രിക് സമ്പ്രദായം സ്വീകരിച്ചതിനുശേഷം, I.R.C കൊണ്ടുവന്ന മറ്റ് മാനദണ്ഡങ്ങളുടെ വെളിച്ചത്തിൽ അനുയോജ്യമായ പരിഷ്കാരങ്ങളോടെ ഈ പ്രസിദ്ധീകരണം പരിഷ്കരിക്കേണ്ടതുണ്ട്. ലോകമെമ്പാടുമുള്ള സമീപകാല സമ്പ്രദായങ്ങളും ഇടക്കാലത്ത്. ഈ ആവശ്യം നിറവേറ്റുന്നതിന്, ഒരു പുതിയ കരട് I.R.C. സെക്രട്ടേറിയറ്റ് എൽ. കടിയാലി, എ.കെ. ഭട്ടാചാര്യ. ഇനിപ്പറയുന്നവ ഉൾപ്പെടുന്ന സവിശേഷതകളും മാനദണ്ഡങ്ങളും സമിതി രൂപീകരിച്ച ഒരു വർക്കിംഗ് ഗ്രൂപ്പ് ഇത് അവലോകനം ചെയ്യുകയും പരിഷ്കരിക്കുകയും ചെയ്തു:
ഡോ.എം.പി. ധീർ
R.P. സിക്ക
എ.കെ. ഭട്ടാചാര്യ
പരിഷ്കരിച്ച കരട് 1977 മെയ് 16 ന് നടന്ന യോഗത്തിൽ സ്പെസിഫിക്കേഷൻസ് ആന്റ് സ്റ്റാൻഡേർഡ് കമ്മിറ്റി അംഗീകരിച്ചു. പിന്നീട് ഇത് എക്സിക്യൂട്ടീവ് കമ്മിറ്റി രക്തചംക്രമണത്തിലൂടെ അംഗീകരിക്കുകയും തുടർന്ന് ജൂൺ 3 ന് നടന്ന 93-ാമത് യോഗത്തിൽ ഇന്ത്യൻ റോഡ് കോൺഗ്രസ് കൗൺസിൽ അംഗീകരിക്കുകയും ചെയ്തു. , 1978 പ്രൊഫ. സി.ജി അടങ്ങുന്ന ഒരു വർക്കിംഗ് ഗ്രൂപ്പിൽ അവശേഷിപ്പിച്ച ചില പരിഷ്കാരങ്ങൾക്ക് വിധേയമായി സ്വാമിനാഥൻ, ആർ.സി. സിംഗ്, കേണൽ അവ്താർ സിംഗ്, ആർ.പി. സിക്ക, പി.സി. ഭാസിൻ, സെക്രട്ടറി ഐ.ആർ.സി. ന്റെ അന്തിമ പരിഷ്കരണവും എഡിറ്റിംഗും1
സ്പെസിഫിക്കേഷൻസ് ആന്റ് സ്റ്റാൻഡേർഡ് കമ്മിറ്റി അംഗം സെക്രട്ടറി ആർ.പി.സിക്കയും കെ. അരുണാചലവും സംയുക്തമായി വാചകം ചെയ്തു.
നിലവിലെ എഞ്ചിനീയറിംഗ് പരിശീലനത്തിന്റെ വെളിച്ചത്തിൽ അനുയോജ്യമായ പരിഷ്കാരങ്ങളും കൂട്ടിച്ചേർക്കലുകളും ഉൾപ്പെടുത്തി ഇന്ത്യൻ റോഡ്സ് കോൺഗ്രസിന്റെ നിലവിലുള്ള മാനദണ്ഡങ്ങളും ശുപാർശകളും അടിസ്ഥാനമാക്കിയുള്ളതാണ് പ്രസിദ്ധീകരണം. നിർദ്ദേശിച്ചിരിക്കുന്ന മാനദണ്ഡങ്ങൾ അടിസ്ഥാനപരമായി ഉപദേശക സ്വഭാവമുള്ളവയാണ്, എന്നാൽ ന്യായമായതായി കണക്കാക്കിയാൽ വളരെ ബുദ്ധിമുട്ടുള്ള സാഹചര്യങ്ങളിൽ ഇത് ഒരു പരിധിവരെ അയവുവരുത്താം. എന്നിരുന്നാലും, പൊതുവായി ശ്രമിക്കുന്നത്, സൂചിപ്പിച്ച ഏറ്റവും കുറഞ്ഞതിനേക്കാൾ ഉയർന്ന മാനദണ്ഡങ്ങൾ ലക്ഷ്യം വച്ചുള്ളതായിരിക്കണം.
ടെക്സ്റ്റ് ഗ്രാമീണ ഹൈവേകളുടെ ജ്യാമിതീയ രൂപകൽപ്പന മാനദണ്ഡങ്ങൾ കൈകാര്യം ചെയ്യുന്നു **, അതായത്, ബിൽറ്റ്-അപ്പ് ഏരിയയ്ക്ക് പുറത്തുള്ള തുറന്ന രാജ്യത്ത് പ്രധാനമായും സ്ഥിതിചെയ്യുന്ന നഗരേതര റോഡുകൾ. എന്നിരുന്നാലും റോഡിന്റെ സ്വഭാവം മൊത്തത്തിൽ മാറാത്ത കാലത്തോളം വിന്യാസം അന്തർനിർമ്മിത പ്രകൃതിയുടെ ഒറ്റപ്പെട്ട ഭാഗങ്ങളിലൂടെ കടന്നുപോകാം. നഗര റോഡുകൾക്കോ നഗര തെരുവുകൾക്കോ ഈ മാനദണ്ഡം ബാധകമല്ല. എക്സ്പ്രസ് ഹൈവേകൾക്കും ഇത് ബാധകമല്ല. റോഡ് കവലകളുടെ ജ്യാമിതീയ രൂപകൽപ്പന ഘടകങ്ങൾ നിലവാരത്തിലും പരിഗണിക്കില്ല.
ക്രോസ്സെക്ഷണൽ ഘടകങ്ങൾ ഒഴികെയുള്ള ഒരു ഹൈവേയുടെ ജ്യാമിതീയ സവിശേഷതകൾ സ്റ്റേജ് നിർമ്മാണത്തിന് കടം കൊടുക്കുന്നില്ല. തുടർന്നുള്ള റോഡരികിലെ വികസനം കാരണം ജ്യാമിതീയ അപര്യാപ്തതകൾ ചിലവേറിയതും ചിലപ്പോൾ ശരിയാക്കാൻ കഴിയാത്തതുമാണ്. അതിനാൽ, ജ്യാമിതീയ ആവശ്യകതകൾ തുടക്കത്തിൽ തന്നെ കാണേണ്ടത് അത്യാവശ്യമാണ്.
ഇന്ത്യയിലെ നഗരേതര റോഡുകളെ അഞ്ച് വിഭാഗങ്ങളായി തിരിച്ചിരിക്കുന്നു:
** മറ്റ് ജില്ലാ റോഡുകളെയും വില്ലേജ് റോഡുകളെയും സാധാരണയായി പരാമർശിക്കുന്ന ഗ്രാമീണ റോഡുകളുമായി ഇവ തെറ്റിദ്ധരിക്കരുത്. ഗ്രാമീണ റോഡുകളുടെ ജ്യാമിതീയ രൂപകൽപ്പന ഘടകങ്ങൾ ഉയർന്ന വിഭാഗത്തിലുള്ള റോഡുകളോടൊപ്പം ഈ പ്രസിദ്ധീകരണത്തിൽ ഉൾപ്പെടുത്തിയിട്ടുണ്ടെങ്കിലും, ഗ്രാമീണ റോഡുകളുടെ രൂപകൽപ്പനയെയും നിർമ്മാണത്തെയും കുറിച്ച് കൂടുതൽ സമഗ്രമായ മാർഗ്ഗനിർദ്ദേശം ഐആർസി സ്പെഷ്യൽ പബ്ലിക്കേഷൻ നമ്പർ 20, “മാനുവൽ ഓൺ റൂട്ട് ലൊക്കേഷനിൽ നിന്ന് ലഭിക്കും. , ഗ്രാമീണ റോഡുകളുടെ രൂപകൽപ്പന, നിർമ്മാണം, പരിപാലനം (മറ്റ് ജില്ലാ റോഡുകളും ഗ്രാമ റോഡുകളും) ".
2പ്രധാന തുറമുഖങ്ങൾ, വിദേശ പാതകൾ, സംസ്ഥാന തലസ്ഥാനങ്ങൾ, വലിയ വ്യാവസായിക, ടൂറിസ്റ്റ് കേന്ദ്രങ്ങൾ എന്നിവയുമായി ബന്ധിപ്പിക്കുന്ന രാജ്യത്തിന്റെ നീളത്തിലും വീതിയിലും സഞ്ചരിക്കുന്ന പ്രധാന പാതകളാണ് ദേശീയപാതകൾ.
ജില്ലാ ആസ്ഥാനത്തെയും സംസ്ഥാനത്തിനുള്ളിലെ പ്രധാന നഗരങ്ങളെയും ബന്ധിപ്പിച്ച് ദേശീയപാതകളുമായോ അയൽ സംസ്ഥാനങ്ങളുടെ ദേശീയപാതകളുമായോ ബന്ധിപ്പിക്കുന്ന സംസ്ഥാനത്തിന്റെ ധമനികളാണ് സംസ്ഥാനപാതകൾ.
ഉൽപാദനത്തിൻറെയും വിപണിയുടെയും മേഖലകൾക്ക് സേവനം നൽകുന്ന പ്രധാന റോഡുകളാണ് പ്രധാന ജില്ലാ റോഡുകൾ, ഇവ പരസ്പരം അല്ലെങ്കിൽ പ്രധാന ഹൈവേകളുമായി ബന്ധിപ്പിക്കുന്നു.
മറ്റ് ജില്ലാ റോഡുകൾ ഗ്രാമീണ ഉൽപാദന മേഖലകളിൽ സേവനമനുഷ്ഠിക്കുന്ന റോഡുകളാണ്, അവ മാർക്കറ്റ് സെന്ററുകൾ, താലൂക്ക് / തഹസിൽ ആസ്ഥാനം, ബ്ലോക്ക് വികസന ആസ്ഥാനം അല്ലെങ്കിൽ മറ്റ് പ്രധാന to ട്ട്ലെറ്റുകൾ നൽകുന്നു.
റോഡുകൾ.
ഗ്രാമങ്ങളെയോ ഗ്രാമങ്ങളുടെ ഗ്രൂപ്പുകളെയോ പരസ്പരം ബന്ധിപ്പിക്കുന്ന റോഡുകളും ഉയർന്ന വിഭാഗത്തിന്റെ ഏറ്റവും അടുത്തുള്ള റോഡുമാണ് വില്ലേജ് റോഡുകൾ.
ഒരു ഹൈവേയുടെ ജ്യാമിതീയ രൂപകൽപ്പന ഭൂപ്രദേശത്തെ കാര്യമായി സ്വാധീനിക്കുന്നു. വിവിധ തരം ഭൂപ്രദേശങ്ങൾക്ക് വ്യത്യസ്ത മാനദണ്ഡങ്ങൾ തിരഞ്ഞെടുക്കുന്നതിന് സമ്പദ്വ്യവസ്ഥ നിർദ്ദേശിക്കുന്നു. ഹൈവേ വിന്യാസത്തിലുടനീളമുള്ള രാജ്യത്തിന്റെ പൊതുവായ ചരിവുകളാൽ ഭൂപ്രദേശം തരംതിരിക്കപ്പെടുന്നു, ഇതിനായി പട്ടിക 1 ൽ നൽകിയിരിക്കുന്ന മാനദണ്ഡങ്ങൾ പാലിക്കണം. ഒരു ഭൂപ്രദേശം തരംതിരിക്കുമ്പോൾ, വ്യത്യസ്ത ഭൂപ്രദേശങ്ങളുടെ ഹ്രസ്വ ഒറ്റപ്പെട്ട ഭാഗങ്ങൾ കണക്കിലെടുക്കരുത്.
| എസ്. | ഭൂപ്രദേശം വർഗ്ഗീകരണം | രാജ്യത്തിന്റെ ശതമാനം ക്രോസ് ചരിവ് |
|---|---|---|
| 1. | പ്ലെയിൻ | 0-10 |
| 2. | റോളിംഗ് | 10-25 |
| 3. | പർവതനിര | 25—60 |
| 4. | കുത്തനെയുള്ള | 60 നേക്കാൾ വലുത് |
5.1. രൂപകൽപ്പന വേഗത തിരഞ്ഞെടുക്കുന്നത് റോഡിന്റെ പ്രവർത്തനത്തെയും ഭൂപ്രദേശത്തെയും ആശ്രയിച്ചിരിക്കുന്നു. മറ്റ് എല്ലാ ജ്യാമിതീയ രൂപകൽപ്പന സവിശേഷതകളും നിർണ്ണയിക്കുന്ന അടിസ്ഥാന പാരാമീറ്ററാണ് ഇത്. വിവിധ ക്ലാസ് റോഡുകളുടെ രൂപകൽപ്പന വേഗത പട്ടിക 2 ൽ നൽകിയിരിക്കണം.3
| s. ഇല്ല. | റോഡ് വർഗ്ഗീകരണം | ഡിസൈൻ വേഗത, കിലോമീറ്റർ / മണിക്കൂർ | |||||||
|---|---|---|---|---|---|---|---|---|---|
| സമതലപ്രദേശം | റോളിംഗ് ഭൂപ്രദേശം | പർവതപ്രദേശം | കുത്തനെയുള്ള ഭൂപ്രദേശം | ||||||
| ഡിസൈൻ വേഗത നിയന്ത്രിക്കുന്നു | കുറഞ്ഞ ഡിസൈൻ വേഗത | ഡിസൈൻ വേഗത നിയന്ത്രിക്കുന്നു | കുറഞ്ഞ ഡിസൈൻ വേഗത | ഡിസൈൻ വേഗത നിയന്ത്രിക്കുന്നു | കുറഞ്ഞ ഡിസൈൻ വേഗത | ഡിസൈൻ വേഗത നിയന്ത്രിക്കുന്നു | കുറഞ്ഞ ഡിസൈൻ വേഗത | ||
| 1. | ദേശീയ, സംസ്ഥാനപാതകൾ | 100 | 80 | 80 | 65 | 50 | 40 | 40 | 30 |
| 2. | പ്രധാന ജില്ലാ റോഡുകൾ | 80 | 65 | 65 | 50 | 40 | 30 | 30 | 20 |
| 3. | മറ്റ് ജില്ലാ റോഡുകൾ | 65 | 50 | 50 | 40 | 30 | 25 | 25 | 20 |
| 4. | ഗ്രാമ റോഡുകൾ | 50 | 40 | 40 | 35 | 25 | 20 | 25 | 204 |
വിവിധ ജ്യാമിതീയ രൂപകൽപ്പന സവിശേഷതകളെ പരസ്പരബന്ധിതമാക്കുന്നതിനുള്ള മാർഗ്ഗനിർദ്ദേശ മാനദണ്ഡമായിരിക്കണം “റൂളിംഗ് ഡിസൈൻ സ്പീഡ്”. എന്നിരുന്നാലും, “റൂളിംഗ് ഡിസൈൻ സ്പീഡ്” അടിസ്ഥാനമാക്കി ഒരു ഡിസൈൻ അനുവദിക്കാത്ത ചെലവുകൾ ഉൾപ്പെടെയുള്ള സൈറ്റ് അവസ്ഥകളിൽ “മിനിമം ഡിസൈൻ സ്പീഡ്” സ്വീകരിക്കാം.
ഒരു നിശ്ചിത ഹൈവേയിൽ ഡിസൈൻ വേഗത ഏകതാനമായിരിക്കണം. എന്നാൽ ഭൂപ്രദേശത്തിലെ വ്യതിയാനങ്ങൾ വേഗതയിൽ മാറ്റങ്ങൾ ഒഴിവാക്കാനാവില്ല. ഇത് എവിടെയാണോ, ഡിസൈൻ വേഗത പെട്ടെന്ന് മാറ്റരുതെന്നത് അഭികാമ്യമാണ്, പക്ഷേ ക്രമേണ ഡിസൈൻ വേഗത കൂട്ടുന്ന / കുറയ്ക്കുന്നതിന്റെ തുടർച്ചയായ വിഭാഗങ്ങൾ അവതരിപ്പിക്കുന്നതിലൂടെ റോഡ് ഉപയോക്താക്കൾക്ക് ഡിഗ്രി അനുസരിച്ച് മാറ്റം വരുത്താം.
റോഡ് ആവശ്യങ്ങൾക്കായി ഏറ്റെടുത്ത സ്ഥലമാണ് റോഡ് ലാൻഡ് വീതി (വലതുവശത്തെ വഴി എന്നും അറിയപ്പെടുന്നു). വിവിധ തരം റോഡുകൾക്ക് അഭികാമ്യമായ സ്ഥല വീതി പട്ടിക 3 ൽ സൂചിപ്പിച്ചിരിക്കുന്നു.
| എസ്. | റോഡ് വർഗ്ഗീകരണം | സമതലവും ഉരുളുന്നതുമായ ഭൂപ്രദേശം | മലയോരവും കുത്തനെയുള്ളതുമായ ഭൂപ്രദേശം | ||||
|---|---|---|---|---|---|---|---|
| തുറന്ന പ്രദേശങ്ങൾ | ബിൽറ്റ്-അപ്പ് ഏരിയകൾ | തുറന്ന പ്രദേശങ്ങൾ | ബിൽറ്റ്-അപ്പ് ഏരിയകൾ | ||||
| സാധാരണ | ശ്രേണി | സാധാരണ | ശ്രേണി | സാധാരണ | സാധാരണ | ||
| 1. | ദേശീയ, സംസ്ഥാനപാതകൾ | 45 | 30-60 | 30 | 30-60 | 24 | 20 |
| 2. | പ്രധാന ജില്ലാ റോഡുകൾ | 25 | 25-30 | 20 | 15-25 | 18 | 15 |
| 3. | മറ്റ് ജില്ലാ റോഡുകൾ | 15 | 15-25 | 15 | 15-20 | 15 | 12 |
| 4. | ഗ്രാമ റോഡുകൾ | 12 | 12-18 | 10 | 10-15 | 9 | 9 |
ഉയർന്ന ബാങ്കുകളിലോ ആഴത്തിലുള്ള മുറിവുകളിലോ, ഭൂമിയുടെ വീതി അനുയോജ്യമായ രീതിയിൽ വർദ്ധിപ്പിക്കണം. അതുപോലെ, അസ്ഥിരമായ അല്ലെങ്കിൽ മണ്ണിടിച്ചിൽ സാധ്യതയുള്ള പ്രദേശങ്ങളിൽ ഉയർന്ന മൂല്യം സ്വീകരിക്കണം. പ്രധാനപ്പെട്ട റോഡ് കവലകളിൽ ശരിയായ വഴിയിലൂടെ സഞ്ചരിക്കേണ്ടതിന്റെ ആവശ്യകതയും കണക്കിലെടുക്കണം.5
ഭാവിയിൽ ഒരു റോഡ് ഉയർന്ന വർഗ്ഗീകരണത്തിലേക്ക് അപ്ഗ്രേഡുചെയ്യപ്പെടുമെന്ന് പ്രതീക്ഷിക്കുന്നുവെങ്കിൽ, ഭൂമിയുടെ വീതി രണ്ടാമത്തേതിന് സമാനമായിരിക്കണം.
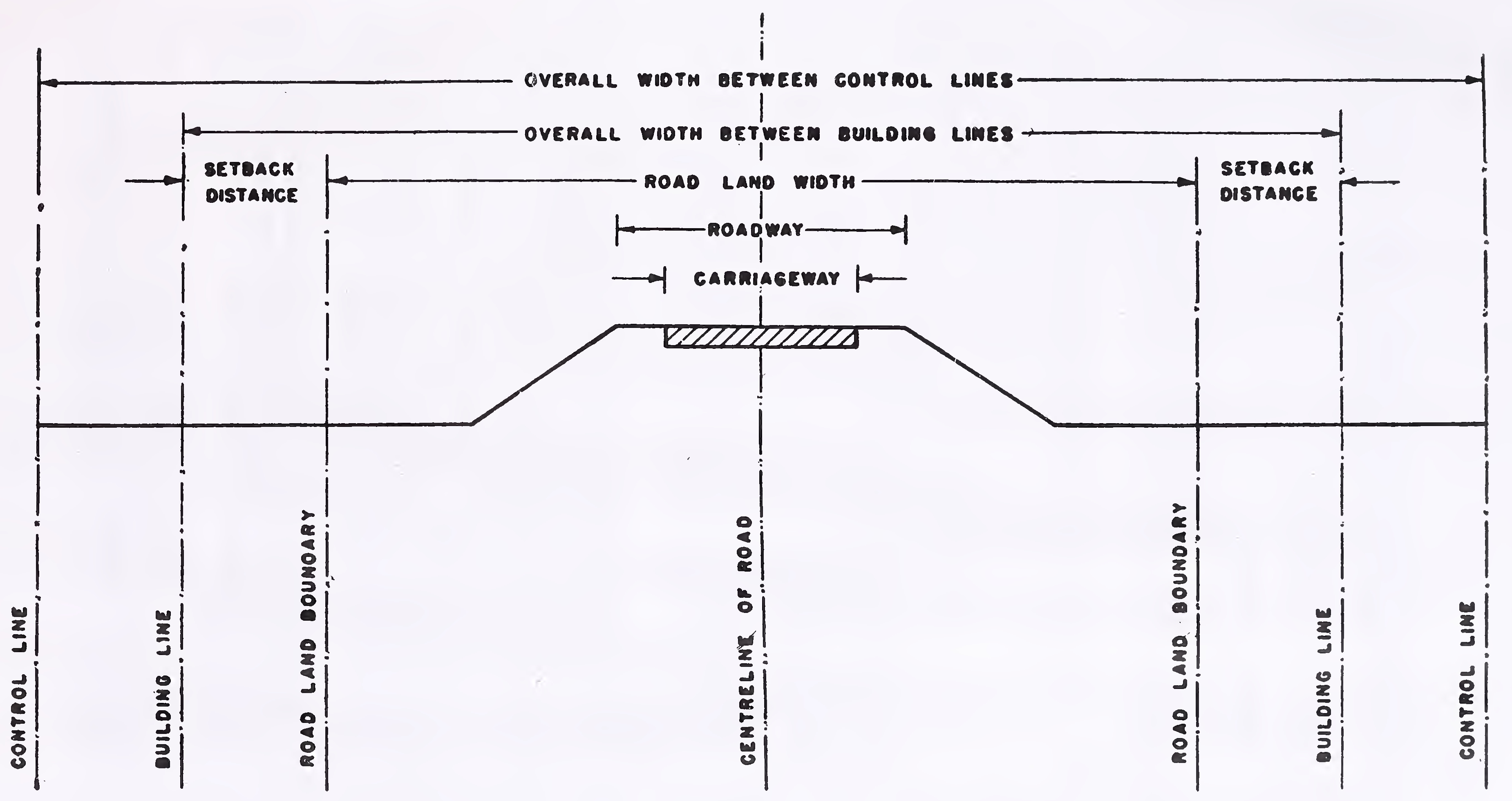
തിരക്ക് തടയുന്നതിനും ഭാവിയിൽ റോഡ് മെച്ചപ്പെടുത്തുന്നതിന് മതിയായ ഇടം സംരക്ഷിക്കുന്നതിനും, റോഡുകളിൽ കെട്ടിട നിർമ്മാണത്തിന് നിയന്ത്രണങ്ങൾ ഏർപ്പെടുത്തുന്നത് നല്ലതാണ്. റോഡിൽ നിന്ന് ഒരു നിശ്ചിത ദൂരത്തിനുള്ളിൽ കെട്ടിട പ്രവർത്തനം അനുവദിക്കരുത്, ഇത് റോഡ് അതിർത്തിയിൽ നിന്ന് പുറകോട്ട് “ബിൽഡിംഗ് ലൈൻ” എന്ന് വിളിക്കപ്പെടുന്ന ഒരു സാങ്കൽപ്പിക രേഖയാൽ നിർവചിക്കപ്പെടുന്നു. കൂടാതെ, “കൺട്രോൾ ലൈനുകൾ” എന്നറിയപ്പെടുന്ന കെട്ടിട പരിധിക്ക് അപ്പുറത്തേക്ക് കൂടുതൽ ദൂരത്തേക്ക് കെട്ടിട പ്രവർത്തനത്തിന്റെ സ്വഭാവം നിയന്ത്രിക്കുന്നത് അഭികാമ്യമാണ്. റോഡ് സെന്റർ ലൈനിനോടും റോഡ് അതിർത്തിയോടും ബന്ധപ്പെട്ട് കെട്ടിടവും നിയന്ത്രണ ലൈനുകളും ചിത്രം 1 ൽ ചിത്രീകരിച്ചിരിക്കുന്നു.
നിർമ്മാണത്തിനും നിയന്ത്രണ ലൈനുകൾക്കുമുള്ള ശുപാർശിത മാനദണ്ഡങ്ങൾ പട്ടിക 4 ൽ നൽകിയിരിക്കുന്നു. തടയുന്നതിനുള്ള നടപടികളെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്
| റോഡ് വർഗ്ഗീകരണം | സമതലവും ഉരുളുന്നതുമായ ഭൂപ്രദേശം | മലയോരവും കുത്തനെയുള്ളതുമായ ഭൂപ്രദേശം | |||
|---|---|---|---|---|---|
| തുറന്ന പ്രദേശങ്ങൾ | ബിൽറ്റ്-അപ്പ് ഏരിയകൾ | തുറന്ന പ്രദേശങ്ങൾ | ബിൽറ്റ്-അപ്പ് ഏരിയകൾ | ||
| ബിൽഡിംഗ് ലൈനുകൾക്കിടയിലുള്ള മൊത്തത്തിലുള്ള വീതി (മീറ്റർ) |
നിയന്ത്രണ ലൈനുകൾക്കിടയിലുള്ള മൊത്തത്തിലുള്ള വീതി (മീറ്റർ) |
ബിൽഡിംഗ് ലൈനും റോഡ് അതിർത്തിയും തമ്മിലുള്ള ദൂരം (സെറ്റ് ബാക്ക്) (മീറ്റർ) |
ബിൽഡിംഗ് ലൈനും റോഡ് അതിർത്തിയും തമ്മിലുള്ള ദൂരം (സെറ്റ് ബാക്ക്) (മീറ്റർ) |
||
| 1 | 2 | 3 | 4 | 5 | 6 |
| 1. ദേശീയ, സംസ്ഥാനപാതകൾ | 80 | 150 | 3-6 | 3-5 | 3-5 |
| 2. പ്രധാന ജില്ലാ റോഡുകൾ | 50 | 100 | 3-5 | 3-5 | 3-5 |
| 3. മറ്റ് ജില്ലാ റോഡുകൾ | 25/30 * | 35 | 3-5 | 3-5 | 3-5 |
| 4. ഗ്രാമ റോഡുകൾ | 25 | 30 | 3-5 | 3-5 | 3-5 |
കുറിപ്പുകൾ: 1. * ഈ നിരയിൽ സൂചിപ്പിച്ചിരിക്കുന്ന കെട്ടിട ലൈനുകൾക്കിടയിലുള്ള വീതിക്ക് തുല്യമാണ് ലാൻഡ് വീതി എങ്കിൽ, റോഡ് ലാൻഡ് അതിർത്തിയിൽ നിന്നും 2.5 മീറ്റർ അകലെ കെട്ടിട ലൈനുകൾ സജ്ജമാക്കണം.
2. റോഡ് സെന്റർ ലൈനിന്റെയും റോഡ് ലാൻഡ് അതിർത്തിയുടെയും ആപേക്ഷിക കെട്ടിട ലൈനുകൾ, നിയന്ത്രണ ലൈനുകൾ, തിരിച്ചടി ദൂരം എന്നിവയ്ക്കായി ചിത്രം 1 കാണുക.6
ചിത്രം 1. റോഡ് ലാൻഡ് അതിർത്തി, കെട്ടിട ലൈനുകൾ, നിയന്ത്രണ ലൈനുകൾ7
റിബൺ. റോഡുകളിലൂടെയുള്ള വികസനം, ഐആർസി സ്പെഷ്യൽ പബ്ലിക്കേഷൻ നമ്പർ 15, “ഹൈവേകളിലെ റിബൺ വികസനം, അതിന്റെ പ്രതിരോധം” എന്നിവയിലും പരാമർശിക്കാം.IRC: 62-1976 “ഹൈവേകളിലെ പ്രവേശനം നിയന്ത്രിക്കുന്നതിനുള്ള മാർഗ്ഗനിർദ്ദേശങ്ങൾ”.
പ്ലെയിൻ, റോളിംഗ് ഭൂപ്രദേശങ്ങളിലെ ഒറ്റ, രണ്ട് വരി റോഡുകളുടെ റോഡ്വേയുടെ വീതി പട്ടിക 5 ൽ നൽകിയിരിക്കണം.
| എസ്. | റോഡ് വർഗ്ഗീകരണം | റോഡ്വേ വീതി (മീറ്റർ) |
|---|---|---|
| 1. | ദേശീയപാതകളും സംസ്ഥാനപാതകളും
(ഒറ്റ അല്ലെങ്കിൽ രണ്ട് പാതകൾ) |
12.0 |
| 2. | പ്രധാന ജില്ലാ റോഡുകൾ
(ഒറ്റ അല്ലെങ്കിൽ രണ്ട് പാതകൾ) |
9.0 |
| 3. | മറ്റ് ജില്ലാ റോഡുകൾ | |
| (i) ഒറ്റ പാത | 7.5 | |
| (ii) രണ്ട് പാതകൾ | 9.0 | |
| 4. | ഗ്രാമ റോഡുകൾ
(ഒറ്റവരി) |
7.5 |
| കുറിപ്പ്: ഒറ്റവരി പാതയുള്ള സംസ്ഥാന പാതകളുടെ കാര്യത്തിൽ, വണ്ടിയുടെ പാത രണ്ട് പാതകളായി വീതികൂട്ടാനുള്ള സാധ്യത വിദൂരമായി കണക്കാക്കിയാൽ റോഡ്വേയുടെ വീതി 9 മീറ്ററായി കുറയ്ക്കാം. | ||
പർവ്വത, കുത്തനെയുള്ള ഭൂപ്രദേശങ്ങളിലെ ഒറ്റ, രണ്ട് വരി റോഡുകൾക്ക് റോഡ്വേയുടെ വീതി, സൈഡ് ഡ്രെയിനുകൾ, പാരാപെറ്റുകൾ എന്നിവയൊഴികെ പട്ടിക 6 ൽ സൂചിപ്പിച്ചിരിക്കുന്നതുപോലെ ആയിരിക്കണം.
ഇനിപ്പറയുന്ന ആവശ്യകതകൾ നിറവേറ്റുന്നതിനായി പർവ്വത, കുത്തനെയുള്ള ഭൂപ്രദേശങ്ങളിലെ ഒറ്റ പാത റോഡുകളിൽ കടന്നുപോകുന്ന സ്ഥലങ്ങളോ ലേ-ബൈകളോ നൽകണം:
| എസ്. | റോഡ് വർഗ്ഗീകരണം | റോഡ്വേ വീതി (മീറ്റർ) |
|---|---|---|
| 1. | ദേശീയപാതകളും സംസ്ഥാനപാതകളും | |
| (i) ഒറ്റ പാത | 6.25 | |
| (ii) രണ്ട് പാതകൾ | 8.8 | |
| 2. | പ്രധാന ജില്ലാ റോഡുകളും മറ്റ് ജില്ലാ റോഡുകളും (ഒറ്റവരി) | 4.75 |
| 3. | വില്ലേജ് റോഡുകൾ (ഒറ്റവരി) | 4.0 |
കുറിപ്പുകൾ:
| ||
പട്ടിക 6 അനുസരിച്ച് റോഡ്വേ വീതിയുള്ള ദേശീയപാത, ദേശീയപാതകളിൽ കടന്നുപോകുന്ന സ്ഥലങ്ങൾ ആവശ്യമില്ല. എന്നാൽ ഇടുങ്ങിയ റോഡ്വേയുള്ള ഒറ്റവരി പാതകളിൽ, യഥാർത്ഥ ആവശ്യങ്ങൾക്കനുസരിച്ച് കടന്നുപോകുന്ന ചില സ്ഥലങ്ങൾ നൽകുന്നത് അഭികാമ്യമാണ്. മറ്റ് റോഡുകളിൽ ഇവ കിലോമീറ്ററിന് 2-3 എന്ന നിരക്കിൽ പൊതുവായി നൽകണം. വളവുകളിലും ദൃശ്യപരതയിലും ലഭ്യമായ അധിക വീതി കണക്കിലെടുത്ത് അവയുടെ കൃത്യമായ സ്ഥാനം നിർണ്ണായകമായി നിർണ്ണയിക്കണം.
സാധാരണയായി കടന്നുപോകുന്ന സ്ഥലങ്ങൾ / ലേ-ബൈകൾ 3.75 മീറ്റർ വീതിയും അകത്തെ അരികിൽ 30 മീറ്റർ നീളവും (അതായത് വണ്ടിയുടെ വശത്തേക്ക്), 20 മീറ്റർ നീളവും ആയിരിക്കണം.9
ന്യൂലി-ലെയ്ൻ ഹൈവേകൾക്കായി, തോളുകൾക്കും സെൻട്രൽ മീഡിയൻസിനും പുറമെ ആവശ്യമായ ട്രാഫിക് പാതകൾക്ക് റോഡ്വേ വീതി മതിയായതായിരിക്കണം. തോളുകളുടെ വീതി പൊതുവേ 2.5 മീറ്ററായിരിക്കണം. കാരിയേജ്വേയുടെയും മീഡിയന്റെയും വീതിക്കായി, യഥാക്രമം 6.4, 6.6 ഖണ്ഡികകളിലേക്ക് റഫറൻസ് നൽകാം.
ക്രോസ്-ഡ്രെയിനേജ് ഘടനകൾ ആദ്യഘട്ടത്തിൽ വിശാലമാക്കാൻ പ്രയാസമാണ്. അതിനാൽ, അവർക്കായുള്ള റോഡ്വേ വീതി ആസൂത്രണ ഘട്ടത്തിൽ തന്നെ വളരെ ശ്രദ്ധാപൂർവ്വം തീരുമാനിക്കണം. ഇക്കാര്യത്തിൽ ശുപാർശ ചെയ്യുന്ന ഏറ്റവും കുറഞ്ഞ മൂല്യങ്ങൾ ഖണ്ഡിക 6.3.2, 6.3.3 എന്നിവയിൽ നൽകിയിരിക്കുന്നു. തുടക്കത്തിൽ ചില കാരണങ്ങളാൽ താഴ്ന്ന നിലവാരത്തിലേക്ക് നിർമ്മിച്ച റോഡുകൾക്കോ അല്ലെങ്കിൽ നവീകരിക്കുകയോ വീതികൂട്ടുകയോ ചെയ്യുമെന്ന് പ്രതീക്ഷിക്കുന്നവ. ഭാവിയിൽ, ക്രോസ് ഡ്രെയിനേജ് ഘടനയിൽ തുടക്കത്തിൽ തന്നെ ഉയർന്ന റോഡ്വേ വീതിയിലേക്ക് പോകുന്നത് അഭികാമ്യമാണ്. .
പ്ലെയിൻ, റോളിംഗ് ഭൂപ്രദേശങ്ങളിൽ, കൽവർട്ടുകളുടെ മൊത്തത്തിലുള്ള വീതി(പാരാപറ്റ് മതിലുകൾക്ക് പുറത്ത് നിന്ന് പുറത്തേക്ക് അളക്കുന്നു) പട്ടിക 5 ൽ നൽകിയിരിക്കുന്ന സാധാരണ റോഡ്വേ വീതിക്ക് തുല്യമായിരിക്കണം. പർവ്വത അല്ലെങ്കിൽ കുത്തനെയുള്ള ഭൂപ്രദേശങ്ങളിൽ, വ്യക്തമായ റോഡ്വേ വീതി കൽവർട്ടുകളിൽ ലഭ്യമാണ്(പാരാപറ്റ് മതിലുകൾ അല്ലെങ്കിൽ നിയന്ത്രണങ്ങൾക്കുള്ളിൽ നിന്ന് അകത്തേക്ക് അളക്കുന്നു) ചുവടെയുള്ളതായിരിക്കണം:
| വില്ലേജ് റോഡുകൾ ഒഴികെയുള്ള എല്ലാ റോഡുകളും | ... | പട്ടിക 6 ൽ നൽകിയിരിക്കുന്നതുപോലെ |
| ഗ്രാമ റോഡുകൾ | ||
| കുറഞ്ഞത് | ... | പട്ടിക 6 ൽ നൽകിയിരിക്കുന്നതുപോലെ |
| അഭികാമ്യം | ... | 4.25 മീ |
പാലങ്ങൾ (6 മീറ്റർ സ്പാനിനേക്കാൾ ഗ്രേറ്റർ): പാലങ്ങളിൽ, നിയന്ത്രണങ്ങൾക്കിടയിലുള്ള റോഡ്വേയുടെ വ്യക്തമായ വീതി താഴെയായിരിക്കണം:
| ഒറ്റവരി പാലം | ... | 4.25 മീ |
| ഇരുവരി പാലം | ... | 7.5 മീ |
| മൾട്ടി ലെയ്ൻ പാലം | ... | ഓരോ വണ്ടിക്കും 3.5 മീറ്ററും 0.5 മീറ്ററും |
കോസ്വേകളിലും വെള്ളത്തിൽ മുങ്ങാവുന്ന പാലങ്ങളിലും, റോഡ്വേയുടെ ഏറ്റവും കുറഞ്ഞ വീതി (നിയന്ത്രണങ്ങൾക്കിടയിൽ) 7.5 മീ ആയിരിക്കണം, യോഗ്യതയുള്ള അതോറിറ്റി പ്രത്യേകമായി വീതി കുറച്ചില്ലെങ്കിൽ.
കാൽനടയാത്രക്കാരുടെ ഉപയോഗത്തിനായി ഒരു ഫുട്പാത്ത് നൽകിയിട്ടുണ്ടെങ്കിൽ, അതിന്റെ വീതി 1.5 മീറ്ററിൽ കുറയരുത്.10
വണ്ടിയുടെ സ്റ്റാൻഡേർഡ് വീതി പട്ടിക 7 ൽ സൂചിപ്പിച്ചിരിക്കുന്നതുപോലെ ആയിരിക്കും. റോഡിന്റെ രൂപകൽപ്പന ട്രാഫിക്കും ശേഷിയുമായി ബന്ധപ്പെട്ട് മൊത്തം വീതി നിർണ്ണയിക്കണം, വിഭാഗം 7 കാണുക.
| വണ്ടിയുടെ വീതി (മീറ്റർ) | |||
|---|---|---|---|
| ഒറ്റവരി | ഉയർത്തിയ നിയന്ത്രണങ്ങളില്ലാത്ത രണ്ട് പാതകൾ | ഉയർത്തിയ നിയന്ത്രണങ്ങളുള്ള രണ്ട് പാതകൾ | മൾട്ടി-ലെയ്ൻ നടപ്പാതകൾ, ഓരോ പാതയ്ക്കും വീതി |
| 3.75 ** | 7.0 | 7.5 | 3.5 |
കുറിപ്പുകൾ:
| |||
വണ്ടിയുടെ വീതി മാറുന്നിടത്ത്, ഉദാ. ഒറ്റ പാതയിൽ നിന്ന് രണ്ട് പാതകളിലേക്കോ രണ്ട് പാതകളിലേക്കോ നാല് പാതകളിലേക്കോ, 15 മുതൽ 1 വരെ 20 മുതൽ 1 വരെ ടേപ്പർ വഴി പരിവർത്തനം നടത്തണം.
പട്ടിക 5, 6, 7 എന്നിവ ഉപയോഗിച്ച് ഓരോ ക്ലാസ് ഹൈവേയുടെയും തോളുകളുടെ വീതി നേരിട്ട് ലഭിക്കും. തോളിന്റെ വീതി റോഡ്വേ വീതിയും (പട്ടിക 5 അല്ലെങ്കിൽ 6) കാരിയേജ്വേ വീതിയും (പട്ടിക 7) തമ്മിലുള്ള വ്യത്യാസത്തിന്റെ പകുതിയായിരിക്കും.
6.6.1. മീഡിയൻമാർ കഴിയുന്നത്ര വിശാലമായിരിക്കണം, പക്ഷേ അവരുടെ വീതി പലപ്പോഴും സാമ്പത്തിക പരിഗണനകളാൽ പരിമിതപ്പെടുത്തിയിരിക്കുന്നു. ഗ്രാമീണ ഹൈവേകളിലെ മീഡിയൻമാരുടെ ഏറ്റവും കുറഞ്ഞ വീതി 5 മീറ്ററാണ്, പക്ഷേ ഇത് ഭൂമി നിയന്ത്രിച്ചിരിക്കുന്ന 3 മീറ്ററായി കുറയ്ക്കാം. നീളമുള്ള പാലങ്ങളിലും വയഡാക്റ്റുകളിലും, മീഡിയന്റെ വീതി 1.5 മീറ്ററായി കുറയ്ക്കാം, എന്നാൽ ഏത് സാഹചര്യത്തിലും ഇത് 1.2 മീറ്ററിൽ കുറവായിരിക്കരുത്.
കഴിയുന്നിടത്തോളം, ഹൈവേയുടെ ഒരു പ്രത്യേക വിഭാഗത്തിൽ ശരാശരി ഏകീകൃത വീതി ഉണ്ടായിരിക്കണം. എന്നിരുന്നാലും, മാറ്റങ്ങൾ ഒഴിവാക്കാനാവാത്തയിടത്ത്, 15 ൽ 1 മുതൽ 20 വരെ 1 എന്ന സംക്രമണം നൽകണം.11
റോളിംഗ്, മലയോര രാജ്യങ്ങളിൽ, ശരാശരി വീതി ടോപ്പോഗ്രാഫി അനുസരിച്ച് നിർണ്ണയിക്കപ്പെടും, കൂടാതെ വ്യക്തിഗത വണ്ടികൾ വ്യത്യസ്ത തലങ്ങളിൽ ആകാം.
റോഡുകളുടെ നേരായ ഭാഗങ്ങളിലെ കാംബർ അല്ലെങ്കിൽ ക്രോസ്ഫാൾ വിവിധ തരം ഉപരിതലങ്ങൾക്കായി പട്ടിക 8 ൽ ശുപാർശ ചെയ്തിരിക്കണം. തന്നിരിക്കുന്ന ഉപരിതല തരത്തിന്, മഴയുടെ തീവ്രത കൂടുതലുള്ള പ്രദേശങ്ങളിലും മഴയുടെ തീവ്രത കുറവുള്ള താഴ്ന്ന മൂല്യങ്ങളിലും പട്ടികയിലെ കുത്തനെയുള്ള മൂല്യങ്ങൾ സ്വീകരിക്കാം.
| എസ്. | ഉപരിതല തരം | കാംബർ / ക്രോസ്ഫാൾ |
|---|---|---|
| 1. | ഉയർന്ന തരം ബിറ്റുമിനസ് ഉപരിതല അല്ലെങ്കിൽ സിമന്റ് കോൺക്രീറ്റ് | 1.7-2.0 ശതമാനം (60 ൽ 1 മുതൽ 50 വരെ 1) |
| 2. | നേർത്ത ബിറ്റുമിനസ് പ്രത്യക്ഷപ്പെടുന്നു | 2.0-2.5 ശതമാനം (50 ൽ 1 മുതൽ 40 ൽ 1 വരെ) |
| 3. | വെള്ളം ബന്ധിത മക്കാഡം, ചരൽ | 2.5-3.0 ശതമാനം (40 ൽ 1 മുതൽ 33 വരെ 1) |
| 4. | ഭൂമി | 3.0-4.0 ശതമാനം (33 ൽ 1 മുതൽ 25 ൽ 1 വരെ) |
സാധാരണയായി, സ്ട്രൈറ്റുകളിലെ അവിഭാജ്യ റോഡുകൾക്ക് നടുക്ക് ഒരു കിരീടവും ഇരുവശത്തും അരികിലേക്ക് ചരിഞ്ഞും നൽകണം. എന്നിരുന്നാലും മലയോര റോഡുകളിൽ ഇത് എല്ലാ സാഹചര്യങ്ങളിലും സാധ്യമാകണമെന്നില്ല, പ്രത്യേകിച്ചും നേർഭാഗങ്ങൾ കുറവായതും വളരെ ദൂരെയുള്ളതുമായ ഒരു വിൻഡിംഗ് വിന്യാസം. അത്തരം സന്ദർഭങ്ങളിൽ, വിവേചനാധികാരം പ്രയോഗിക്കാവുന്നതാണ്, സാധാരണ കാംബറിനുപകരം, തിരശ്ചീന വളവുകളിൽ സൂപ്പർലീവേഷൻ ദിശ, ഡ്രെയിനേജ് എളുപ്പമാക്കൽ, മണ്ണൊലിപ്പ് പ്രശ്നം തുടങ്ങിയ ഘടകങ്ങളുമായി ബന്ധപ്പെട്ട് വണ്ടിയുടെ പാതയ്ക്ക് കുന്നിൻ വശത്തേക്ക് ഒരു ഏകദിശയിലുള്ള ക്രോസ്ഫാൾ നൽകാം. താഴേക്കുള്ള കുന്നിന്റെ മുഖം മുതലായവ.
വിഭജിക്കപ്പെട്ട റോഡുകളിൽ, അതായത് ഇരട്ട വണ്ടികൾ ഒരു മീഡിയൻ ഉള്ളതിനാൽ, ഓരോ വണ്ടിയുടെയും പുറം അരികിലേക്ക് ചരിഞ്ഞ് ഏക ദിശയിലുള്ള ക്രോസ്ഫാൾ ഉണ്ടാകുന്നത് പതിവാണ്.
ഭൂമിയുടെ തോളുകൾക്കുള്ള ക്രോസ്ഫാൾ നടപ്പാതയുടെ ചരിവിനേക്കാൾ കുറഞ്ഞത് 0.5 ശതമാനം കുത്തനെയുള്ളതായിരിക്കണം. കുറഞ്ഞത് 3 ശതമാനം.12
തോളുകൾ നിരപ്പാക്കിയാൽ, ഉപരിതല തരത്തിന് അനുയോജ്യമായ ഒരു ക്രോസ്ഫാൾ പട്ടിക 8 നെ പരാമർശിച്ച് തിരഞ്ഞെടുക്കണം.
സൂപ്പർലീവേറ്റഡ് വിഭാഗങ്ങളിൽ, തോളുകൾക്ക് സാധാരണയായി നടപ്പാതയുടെ അതേ ക്രോസ്ഫാൾ ഉണ്ടായിരിക്കണം.
വണ്ടിയുടെ വീതി ഡിസൈൻ ട്രാഫിക്കിന് പര്യാപ്തമായിരിക്കണം, അതായത് ഡിസൈൻ വർഷത്തിൽ റോഡിൽ പ്രതീക്ഷിക്കുന്ന ട്രാഫിക്. ഡിസൈൻ ട്രാഫിക് ട്രാഫിക്കിന്റെ വളർച്ചാ നിരക്ക്, രൂപകൽപ്പന കാലയളവ്, സിസ്റ്റത്തിലെ റോഡിന്റെ പ്രാധാന്യം, റോഡരികിലെ വികസനത്തിന്റെ സ്വഭാവം എന്നിവയെ ആശ്രയിച്ചിരിക്കും. സമ്മിശ്ര ട്രാഫിക് സാഹചര്യങ്ങളിൽ ശേഷി കണക്കുകൂട്ടലുകൾ നടത്തുന്നതിന്, വിവിധ തരം വാഹനങ്ങൾ a 'പാസഞ്ചർ കാർ യൂണിറ്റ്' എന്നറിയപ്പെടുന്ന സാധാരണ യൂണിറ്റ് അവയുടെ എണ്ണം പ്രസക്തമായ തുല്യതാ ഘടകങ്ങളുമായി ഗുണിക്കുന്നു. താൽക്കാലിക മൂല്യങ്ങൾ തുല്യതാ ഘടകങ്ങളുടെ പട്ടിക 9 ൽ നൽകിയിരിക്കുന്നു. ഇവ കവലകളിൽ നിന്ന് അകലെ പ്ലെയിൻ ടെറൈനിൽ തുറന്ന വിഭാഗങ്ങളിൽ ഉപയോഗിക്കാൻ ഉദ്ദേശിച്ചുള്ളതാണ്. ഇക്കാര്യത്തിൽ കൂടുതൽ വിവരങ്ങൾക്ക്, റഫറൻസ് നൽകാംIRC: 64-1976 “ഗ്രാമപ്രദേശങ്ങളിലെ റോഡുകളുടെ ശേഷിയെക്കുറിച്ചുള്ള താൽക്കാലിക മാർഗ്ഗനിർദ്ദേശങ്ങൾ.”
| എസ്. | വാഹന തരം | തുല്യതാ ഘടകം |
|---|---|---|
| 1. | പാസഞ്ചർ കാർ, ടെമ്പോ, ഓട്ടോറിക്ഷ അല്ലെങ്കിൽ കാർഷിക ട്രാക്ടർ | 1.0 |
| 2. | സൈക്കിൾ, മോട്ടോർ സൈക്കിൾ അല്ലെങ്കിൽ സ്കൂട്ടർ | 0.5 |
| 3. | ട്രക്ക്, ബസ് അല്ലെങ്കിൽ കാർഷിക ട്രാക്ടർ-ട്രെയിലർ യൂണിറ്റ് | 3.0 |
| 4. | സൈക്കിൾ റിക്ഷ | 1.5 |
| 5. | കുതിര വരച്ച വാഹനം | 4.0 |
| 6. | കാളവണ്ടി ** | 8.0 |
| ** ചെറിയ കാളവണ്ടികൾക്ക് 6 മൂല്യം ഉചിതമായിരിക്കും. | ||
രൂപകൽപ്പന ആവശ്യങ്ങൾക്കായി, പട്ടിക 10 ൽ നൽകിയിരിക്കുന്നതുപോലെ വിവിധ തരം റോഡുകളുടെ ശേഷി എടുക്കാം.13
| എസ്. | റോഡിന്റെ തരം |
ശേഷി (രണ്ട് ദിശകളിലും പ്രതിദിനം പാസഞ്ചർ കാർ യൂണിറ്റുകൾ) |
|---|---|---|
| 1. | 3.75 മീറ്റർ വീതിയുള്ള വണ്ടിയുടെ പാത സാധാരണ പാതകളുള്ള ഒറ്റവരി പാതകളാണ് | 1,000 |
| 2. | 3.75 മീറ്റർ വീതിയുള്ള ഒറ്റവരി റോഡുകൾ, 1.0 മീറ്റർ വീതിയിൽ വേണ്ടത്ര രൂപകൽപ്പന ചെയ്ത ഹാർഡ് തോളുകളുള്ള | 2,500 രൂപ |
| 3. | സാധാരണ മൺ ചുമലുകളുള്ള 7 മീറ്റർ വീതിയുള്ള വണ്ടി പാതയുള്ള രണ്ട് വരി റോഡുകൾ | 10,000 |
| 4. | ഇന്റർമീഡിയറ്റ് വീതിയുടെ റോഡുകൾ, അതായത് 5.5 മീറ്റർ സാധാരണ വണ്ടികളുള്ള ഒരു വണ്ടി | 5,000 |
| കുറിപ്പ്: ഇരട്ട കാരിയേജ്വേയുള്ള ഹൈവേകളുടെ ശേഷി ട്രാഫിക്കിന്റെ ദിശാസൂചന വിഭജനം, പ്രവേശന നിയന്ത്രണത്തിന്റെ അളവ്, ട്രാഫിക്കിന്റെ ഘടന തുടങ്ങിയ ഘടകങ്ങളെ ആശ്രയിച്ചിരിക്കും. യഥാർത്ഥ സാഹചര്യങ്ങളെ ആശ്രയിച്ച്, 4-പാത വിഭജിത ഹൈവേയുടെ ശേഷി 20,000-30,000 പക്കസ് വരെയാകാം. | ||
ദൃശ്യപരത അനിയന്ത്രിതവും നടപ്പാതയുടെ അരികിൽ നിന്ന് 1.75 മീറ്ററിനുള്ളിൽ പാർശ്വസ്ഥമായ തടസ്സങ്ങളില്ലാത്തതുമായ പട്ടിക 10 ലെ മാനദണ്ഡങ്ങൾ ബാധകമാണ്. തിരക്കേറിയ സമയങ്ങളിൽ മൃഗങ്ങളെ ആകർഷിക്കുന്ന വാഹനങ്ങളുടെ നാമമാത്രമായ അളവ് (5-10 ശതമാനം എന്ന് മാത്രം) ട്രാഫിക് സ്ട്രീമിൽ ഉണ്ടെന്ന് ഇവ അനുമാനിക്കുന്നു. കൂടുതൽ വിവരങ്ങൾക്ക്, റഫറൻസ് നൽകാംIRC: 64-1976.
ദേശീയപാതകളിലെ യാത്രയുടെ സുരക്ഷയ്ക്കായി ദൃശ്യപരത ഒരു പ്രധാന ആവശ്യകതയാണ്. ഇതിനായി, അനാവശ്യമായ അപകടങ്ങളൊന്നും ഉണ്ടാകാതിരിക്കാൻ ഡ്രൈവർമാർക്ക് അവരുടെ വാഹനങ്ങൾ നിയന്ത്രിക്കുന്നതിന് മതിയായ സമയവും ദൂരവും അനുവദിക്കുന്നതിന് മതിയായ സാഹചര്യത്തിന്റെ ദൈർഘ്യം വ്യത്യസ്ത സാഹചര്യങ്ങളിൽ ലഭ്യമായിരിക്കേണ്ടത് ആവശ്യമാണ്.
കൊടുമുടി ലംബമായ വളവുകളുടെ രൂപകൽപ്പനയും തിരശ്ചീന വളവുകളിലെ ദൃശ്യപരതയും പോലെ മൂന്ന് തരത്തിലുള്ള കാഴ്ച ദൂരം ** പ്രസക്തമാണ്: കാഴ്ച ദൂരം നിർത്തുന്നു; കാഴ്ച ദൂരം മറികടക്കുന്നു; ഒപ്പം ഇന്റർമീഡിയറ്റ് കാഴ്ച ദൂരം. ഇവയ്ക്കുള്ള മാനദണ്ഡങ്ങൾ ഖണ്ഡിക 8.2 മുതൽ 8.4 വരെ നൽകിയിരിക്കുന്നു; ഖണ്ഡിക 8.5 ലെ അവരുടെ പ്രയോഗത്തിന്റെ പൊതുതത്ത്വങ്ങൾ. കാഴ്ച ദൂരം അളക്കുന്നതിനുള്ള മാനദണ്ഡങ്ങൾ ഖണ്ഡിക 8.6 ൽ പ്രതിപാദിച്ചിരിക്കുന്നു. തിരശ്ചീന വളവുകളിൽ കാഴ്ച ദൂരത്തിന്റെ ആവശ്യകതകൾ ഖണ്ഡിക 9.7 ൽ ചർച്ചചെയ്യുന്നു.
** ഇവയെ കൂടുതൽ വിശദമായി കൈകാര്യം ചെയ്യുന്നുIRC: 66-1976 “ഗ്രാമീണ ഹൈവേകളിൽ ദൂരത്തേക്ക് ശുപാർശ ചെയ്യുന്ന പരിശീലനം”.14
വാലി കർവുകൾക്കായി, രൂപകൽപ്പന നിയന്ത്രിക്കുന്നത് രാത്രി ദൃശ്യപരതയാണ്, ഇത് ഹെഡ്ലൈറ്റ് കാഴ്ച ദൂരത്തിന്റെ അടിസ്ഥാനത്തിൽ കണക്കാക്കുന്നു. ഡ്രൈവറുടെ കാഴ്ചയ്ക്കുള്ളിലെ ഹെഡ്ലൈറ്റുകൾ പ്രകാശിപ്പിക്കുന്ന വാഹനത്തിന് മുന്നിലുള്ള ദൂരം ഇതാണ്. ഹെഡ്ലൈറ്റ് കാഴ്ച ദൂരത്തിനായുള്ള മാനദണ്ഡങ്ങൾ ഖണ്ഡിക 8.7 ൽ നൽകിയിരിക്കുന്നു.
കാഴ്ചയുടെ ദൂരം നിർത്തുന്നത് ഒരു ഡ്രൈവർ തന്റെ പാതയിൽ ഒരു നിശ്ചല വസ്തുവിനെ കണ്ടുമുട്ടുന്നതിനുമുമ്പ് വാഹനം നിർത്താൻ ആവശ്യമായ വ്യക്തമായ ദൂരമാണ്. കാഴ്ചയുടെ ഏറ്റവും കുറഞ്ഞ ദൂരം നൽകുന്നത്: (i) ഗർഭധാരണത്തിലും ബ്രേക്ക് പ്രതികരണ സമയത്തും സഞ്ചരിച്ച ദൂരം, (ii) ബ്രേക്കിംഗ് ദൂരം. നിർത്തുന്ന ദൂരത്തിന്റെ ഏറ്റവും കുറഞ്ഞ രൂപകൽപ്പന മൂല്യങ്ങൾ വ്യത്യസ്ത വാഹന വേഗതയ്ക്കായി പട്ടിക 11 ൽ കാണിച്ചിരിക്കുന്നു. ഇവ 2.5 സെക്കൻഡിലെ ഗർഭധാരണവും ബ്രേക്ക്-പ്രതികരണ സമയവും അടിസ്ഥാനമാക്കിയുള്ളതാണ്, രേഖാംശ സംഘർഷത്തിന്റെ ഗുണകം മണിക്കൂറിൽ 20 കിലോമീറ്ററിൽ 0.40 മുതൽ മണിക്കൂറിൽ 100 കിലോമീറ്റർ വേഗതയിൽ 0.35 വരെ വ്യത്യാസപ്പെടുന്നു. പട്ടിക 11 പ്രയോഗിക്കുന്നതിന്, തിരഞ്ഞെടുത്ത വേഗത റോഡിന്റെ ഡിസൈൻ വേഗതയ്ക്ക് തുല്യമായിരിക്കണം.
| വേഗത | ഗർഭധാരണവും ബ്രേക്ക് പ്രതികരണവും | ബ്രേക്കിംഗ് | കാഴ്ചയുടെ ദൂരം സുരക്ഷിതമായി നിർത്തുന്നു (മീറ്റർ) | |||
|---|---|---|---|---|---|---|
| വി (കിലോമീറ്റർ / മണിക്കൂർ) | സമയം,ടി (സെക്ക.) | ദൂരം (മീറ്റർ) d1= 0.278vt | രേഖാംശ സംഘർഷത്തിന്റെ ഗുണകം (എഫ്) | ദൂരം (മീറ്റർ)
 |
കണക്കാക്കിയ മൂല്യങ്ങൾ d1+ d2 | രൂപകൽപ്പനയ്ക്കായി വൃത്താകൃതിയിലുള്ള മൂല്യങ്ങൾ |
| 20 | 2.5 | 14 | 0.40 | 4 | 18 | 20 |
| 25 | 2.5 | 18 | 0.40 | 6 | 24 | 25 |
| 30 | 2.5 | 21 | 0.40 | 9 | 30 | 30 |
| 40 | 2.5 | 28 | 0.38 | 17 | 45 | 45 |
| 50 | 2.5 | 35 | 0.37 | 27 | 62 | 60 |
| 60 | 2.5 | 42 | 0.36 | 39 | 81 | 80 |
| 65 | 2.5 | 45 | 0.36 | 46 | 91 | 90 |
| 80 | 2.5 | 56 | 0.35 | 72 | 118 | 120 |
| 100 | 2.5 | 70 | 0.35 | 112 | 182 | 180 |
പ്രവർത്തന ദൂരം ഓവർടേക്കിംഗ് എന്നത് പ്രവർത്തനക്ഷമമാക്കുന്നതിന് ടു-വേ റോഡിൽ ഒരു ഡ്രൈവർക്ക് ലഭ്യമായ ഏറ്റവും കുറഞ്ഞ കാഴ്ച ദൂരമാണ്15
സുരക്ഷിതമായി മറ്റൊരു വാഹനത്തെ മറികടക്കാൻ. ഓവർടേക്കിംഗ് ഡ്രൈവർ വാഹനത്തെ മറികടക്കുന്നതിനുള്ള സാധ്യതകൾ വിലയിരുത്തുകയും വാഹനം പുറത്തെടുക്കുകയും ഹൈവേയുടെ ഡിസൈൻ വേഗതയിൽ മറ്റ് വാഹനങ്ങളെ മറികടക്കുകയും സ്വന്തം ഭാഗത്തേക്ക് മടങ്ങുകയും ചെയ്യുന്ന സമയത്ത് രൂപകൽപ്പനയെ ഒപ്റ്റിമൽ അവസ്ഥയാണ്. ഒരേ വേഗതയിൽ സഞ്ചരിക്കുന്ന എതിർദിശയിൽ നിന്ന് വരുന്ന ഏതെങ്കിലും വാഹനത്തെ കണ്ടുമുട്ടുന്നതിന് മുമ്പ് റോഡിന്റെ.
കാഴ്ച ദൂരത്തെ മറികടക്കുന്നതിനുള്ള ഡിസൈൻ മൂല്യങ്ങൾ പട്ടിക 12 ൽ നൽകിയിരിക്കുന്നു. ഡിസൈൻ വേഗതയെ ആശ്രയിച്ച് യഥാർത്ഥ ഓവർടേക്കിംഗ് കുസൃതിക്കായി 9 മുതൽ 14 സെക്കൻഡ് വരെയുള്ള സമയ ഘടകത്തെ അടിസ്ഥാനമാക്കിയുള്ളവയാണ് ഇത്, ഒരു വാഹനം സഞ്ചരിക്കുന്ന ദൂരം കണക്കിലെടുക്കുന്നതിന് ഏകദേശം 2/3 എണ്ണം വർദ്ധിച്ചു ഒരേ സമയം വിപരീത ദിശയിൽ നിന്ന്.
| വേഗത കിലോമീറ്റർ / മണിക്കൂർ | സമയ ഘടകം, സെക്കൻഡ് | കാഴ്ച ദൂരം (മീറ്റർ) മറികടക്കുന്നു | ||
|---|---|---|---|---|
| മറികടക്കുന്നതിനുള്ള കുസൃതിക്കായി | വാഹനത്തെ എതിർക്കുന്നതിന് | ആകെ | ||
| 40 | 9 | 6 | 15 | 165 |
| . 50 | 10 | 7 | 17 | 235 |
| 60 | 10.8 | 7.2 | 18 | 300 |
| 65 | 11.5 | 7.5 | 19 | 340 |
| 80 | 12.5 | 8.5 | 21 | 470 |
| 100 | 14 | 9 | 23 | 640 |
സുരക്ഷിതമായ സ്റ്റോപ്പിംഗ് കാഴ്ച ദൂരത്തിന്റെ ഇരട്ടിയാണ് ഇന്റർമീഡിയറ്റ് കാഴ്ച ദൂരം. ഡ്രൈവർമാർക്ക് ജാഗ്രതയോടെ മറികടക്കാൻ ഇന്റർമീഡിയറ്റ് കാഴ്ച ദൂരം ന്യായമായ അവസരങ്ങൾ നൽകുന്നുവെന്ന അനുഭവമാണ്.
വ്യത്യസ്ത വേഗതയ്ക്കുള്ള ഇന്റർമീഡിയറ്റ് കാഴ്ച ദൂരത്തിന്റെ ഡിസൈൻ മൂല്യങ്ങൾ പട്ടിക 13 ൽ നൽകിയിരിക്കുന്നു.16
|
വേഗത മണിക്കൂറിൽ കിലോമീറ്റർ |
ഇന്റർമീഡിയറ്റ് കാഴ്ച ദൂരം (മീറ്റർ) |
|---|---|
| 20 | 40 |
| 25 | 50 |
| 30 | 60 |
| 35 | 80 |
| 40 | 90 |
| 50 | 120 |
| 60 | 160 |
| 65 | 180 |
| 80 | 240 |
| 100 | 360 |
ഒറ്റ / രണ്ട് വരി റോഡുകൾ
സാധാരണഗതിയിൽ റോഡിന്റെ പരമാവധി ദൂരം മറികടന്ന് കാഴ്ച ദൂരം നൽകാനാണ് ശ്രമം. ഇത് പ്രായോഗികമല്ലാത്തയിടത്ത്, മറികടക്കാൻ ന്യായമായ അവസരങ്ങൾ നൽകുന്ന ഇന്റർമീഡിയറ്റ് കാഴ്ച ദൂരം അടുത്ത മികച്ച ബദലായി സ്വീകരിക്കണം. എന്നിരുന്നാലും ഒരു സാഹചര്യത്തിലും ദൃശ്യപരത സുരക്ഷിതമായ സ്റ്റോപ്പിംഗ് ദൂരത്തേക്കാൾ കുറവായിരിക്കണം, അത് ഏതെങ്കിലും റോഡിന്റെ അടിസ്ഥാന മിനിമം ആണ്.
കാഴ്ചയുടെ ദൂരത്തെ മറികടക്കുന്നതിന് കഠിനവും വേഗതയേറിയതുമായ ഒരു നിയമവും നിർദ്ദേശിക്കാൻ കഴിയില്ല, കാരണം ഇത് സൈറ്റ് അവസ്ഥകൾ, സാമ്പത്തികശാസ്ത്രം മുതലായവയെ ആശ്രയിച്ചിരിക്കും. ഇത് നല്ലതായിരിക്കും. എന്നിരുന്നാലും ഇനിപ്പറയുന്ന സാഹചര്യങ്ങളിൽ കാഴ്ച ദൂരം മറികടക്കാൻ എഞ്ചിനീയറിംഗ് പരിശീലനം:
വിഭജിത ഹൈവേകൾ
വിഭജിക്കപ്പെട്ട ഹൈവേകളിൽ, അതായത്, കേന്ദ്ര ശരാശരി ഉള്ള ഇരട്ട വണ്ടികൾ, രൂപകൽപ്പന കുറഞ്ഞത് നിർത്തുന്നതിന് തുല്യമായിരിക്കണം17
കാഴ്ച ദൂരം പട്ടിക പട്ടിക 11. പ്രവർത്തന സ ience കര്യത്തിനും ഹൈവേയുടെ മികച്ച രൂപത്തിനും 'കുറച്ച് കൂടുതൽ ലിബറൽ മൂല്യങ്ങൾക്കായി രൂപകൽപ്പന ചെയ്യുന്നത് അഭികാമ്യമാണ്, പട്ടിക 11 ൽ നൽകിയിരിക്കുന്ന മൂല്യങ്ങളുടെ ഇരട്ടി വരെ പറയുക.
അവിഭാജ്യ നാലുവരിപ്പാതകൾ
അവിഭാജ്യ 4-പാത ഹൈവേകളിൽ വണ്ടിയുടെ പകുതിയിൽ മറികടക്കാൻ മതിയായ അവസരങ്ങളുണ്ട്, കൂടാതെ റോഡിന്റെ ശേഷി വളരെ കുറവല്ലെങ്കിൽ മധ്യരേഖ കടക്കേണ്ടതില്ല. അതിനാൽ, അത്തരം റോഡുകൾ വിഭജിക്കപ്പെട്ട ഹൈവേകളുടെ പാതയിൽ രൂപകൽപ്പന ചെയ്തിരിക്കാം, അതായത് പാരാ 8.5.3 കാണുക.
മുകളിൽ ചർച്ച ചെയ്ത വ്യത്യസ്ത തരം കാഴ്ച ദൂരം അളക്കുന്നതിനുള്ള മാനദണ്ഡം പട്ടിക 14 ൽ നൽകിയിരിക്കുന്നു.
| എസ്. | കാഴ്ച ദൂരം | ഡ്രൈവറുടെ കണ്ണിന്റെ ഉയരം | വസ്തുവിന്റെ ഉയരം |
|---|---|---|---|
| 1. | കാഴ്ച ദൂരം സുരക്ഷിതമായി നിർത്തുന്നു | 1.2 മീ | 0.15 മീ |
| 2. | ഇന്റർമീഡിയറ്റ് കാഴ്ച ദൂരം | 1.2 മീ | 1.2 മീ |
| 3. | കാഴ്ച ദൂരം മറികടക്കുന്നു | 1.2 മീ | 1.2 മീ |
പകൽ സമയത്ത്, താഴ്വര വളവുകളിൽ ദൃശ്യപരത ഒരു പ്രശ്നമല്ല. എന്നിരുന്നാലും, രാത്രി യാത്രയ്ക്കായി, ആവശ്യമെങ്കിൽ വാഹനം ഹെഡ്ലൈറ്റുകൾ വഴി മതിയായ ദൂരം പ്രകാശിപ്പിച്ചിട്ടുണ്ടെന്ന് ഡിസൈൻ ഉറപ്പാക്കണം. ഹെഡ്ലൈറ്റ് കാഴ്ച ദൂരം എന്ന് വിളിക്കുന്ന ഈ ദൂരം പട്ടിക 11 ൽ നൽകിയിരിക്കുന്ന സുരക്ഷിതമായ സ്റ്റോപ്പിംഗ് കാഴ്ച ദൂരത്തിന് തുല്യമായിരിക്കണം.
വാലി കർവുകൾ രൂപകൽപ്പന ചെയ്യുന്നതിൽ, ഹെഡ്ലൈറ്റ് കാഴ്ച ദൂരത്തെ സംബന്ധിച്ച് ഇനിപ്പറയുന്ന അളവെടുപ്പ് മാനദണ്ഡങ്ങൾ പാലിക്കണം:
ഡിസൈൻ മാനദണ്ഡങ്ങളുടെ ഏകീകൃതത ഒരു റോഡ് വിന്യാസത്തിന്റെ അത്യാവശ്യമാണ്. ആവശ്യകതകൾ. തന്നിരിക്കുന്ന വിഭാഗത്തിൽ, ഡ്രൈവറുകൾക്കായി അപ്രതീക്ഷിത സാഹചര്യങ്ങൾ സൃഷ്ടിക്കുന്നത് ഒഴിവാക്കാൻ ഒരു ഡിസൈൻ ഘടകത്തിന്റെ സ്ഥിരമായ പ്രയോഗം ഉണ്ടായിരിക്കണം. ഉദാഹരണത്തിന്, ഡിസൈനർ ജാഗ്രത പുലർത്തുന്നില്ലെങ്കിൽ, നല്ലൊരു വിന്യാസത്തിലെ ഹ്രസ്വമായ മൂർച്ചയുള്ള വക്രത അപകട സാധ്യതയുള്ള സ്ഥലമായി പ്രവർത്തിക്കും. അതുപോലെ, ക്രോസ്-ഡ്രെയിനേജ് ഘടനകളിൽ തിരശ്ചീന വിന്യാസത്തിൽ അനാവശ്യമായ എന്തെങ്കിലും ഇടവേള ഒഴിവാക്കണം.
ഒരു പൊതുനിയമം എന്ന നിലയിൽ, തിരശ്ചീന വിന്യാസം നിഷ്പ്രയാസം ആയിരിക്കുകയും ചുറ്റുമുള്ള ഭൂപ്രകൃതിയുമായി നന്നായി യോജിക്കുകയും വേണം. സ്വാഭാവിക കോണ്ടറുകളുമായി പൊരുത്തപ്പെടുന്ന ഒരു ഒഴുകുന്ന വരി സൗന്ദര്യാത്മകമാണ്, നീളമുള്ള ടാൻജെന്റുകൾ ഭൂപ്രദേശത്തിലൂടെ വെട്ടിക്കുറയ്ക്കുന്നു. ഇത് പരിസ്ഥിതിക്ക് സംഭവിക്കുന്ന നാശത്തെ പരിമിതപ്പെടുത്താൻ മാത്രമല്ല, പ്രകൃതിദത്ത ചരിവുകളുടെ സംരക്ഷണത്തിനും സസ്യവളർച്ചയ്ക്കും സഹായിക്കും. നിലവിലുള്ള സവിശേഷതകളുടെ സംരക്ഷണത്തിനും വേണ്ടത്ര പരിഗണന നൽകണം. ഐആർസി സ്പെഷ്യൽ പബ്ലിക്കേഷൻ നമ്പർ 21-1979 “റോഡുകളുടെ ലാൻഡ്സ്കേപ്പിംഗ് ഓൺ മാനുവൽ” ൽ ഈ വർഷം വിശദമായി പ്രതിപാദിക്കുന്നു.
3 കിലോമീറ്റർ കവിയുന്ന നീളമുള്ള ടാൻജെന്റ് വിഭാഗങ്ങൾ കഴിയുന്നത്ര ഒഴിവാക്കണം. നീളമുള്ള വളവുകളുള്ള ഒരു കർവിലിനർ വിന്യാസം സുരക്ഷയുടെയും സൗന്ദര്യശാസ്ത്രത്തിന്റെയും സ്ഥാനത്ത് നിന്ന് മികച്ചതാണ്.-
ഒരു സാധാരണ ചട്ടം പോലെ, നീളമുള്ള ടാൻജെന്റുകളുടെ അവസാനത്തിൽ മൂർച്ചയുള്ള വളവുകൾ അവതരിപ്പിക്കാൻ പാടില്ല, കാരണം ഇവ അങ്ങേയറ്റം അപകടകരമാണ്.
ഹ്രസ്വ വളവുകൾ കിങ്കുകളുടെ രൂപം നൽകുന്നു, പ്രത്യേകിച്ചും ചെറിയ വ്യതിചലന കോണുകൾക്ക്, ഇത് ഒഴിവാക്കണം. വളവുകൾ ആവശ്യത്തിന് നീളമുള്ളതും മനോഹര രൂപങ്ങൾ നൽകുന്നതിന് അനുയോജ്യമായ സംക്രമണങ്ങളും ഉണ്ടായിരിക്കണം. 5 ഡിഗ്രി വ്യതിചലന കോണിന് കർവ് നീളം കുറഞ്ഞത് 150 മീറ്ററായിരിക്കണം, കൂടാതെ ഓരോ ഡിഗ്രി വ്യതിചലന കോണിലും ഇത് 30 മീറ്റർ വർദ്ധിപ്പിക്കണം. ഒരു ഡിഗ്രിയിൽ താഴെയുള്ള വ്യതിചലന കോണുകൾക്ക്, രൂപകൽപ്പന ചെയ്യാൻ ഒരു വക്രവും ആവശ്യമില്ല.
ബുദ്ധിമുട്ടുള്ള ഭൂപ്രദേശങ്ങളിൽ വിപരീത വളവുകൾ ആവശ്യമായി വന്നേക്കാം. ആവശ്യമായ സംക്രമണ വളവുകൾ അവതരിപ്പിക്കുന്നതിന് രണ്ട് വളവുകൾക്കിടയിൽ മതിയായ നീളം ഉണ്ടെന്ന് ഉറപ്പാക്കണം.
ഷോർട്ട് ടാൻജെന്റുകളാൽ വേർതിരിച്ച അതേ ദിശയിലുള്ള കർവുകൾ, ബ്രേക്ക്-ബാക്ക് കർവുകൾ എന്നറിയപ്പെടുന്നു, സൗന്ദര്യാത്മകതയുടെയും സുരക്ഷയുടെയും താൽപ്പര്യത്തിൽ കഴിയുന്നിടത്തോളം ഒഴിവാക്കുകയും പകരം ഒരൊറ്റ വക്രത ഉപയോഗിക്കുകയും വേണം. ഇത് പ്രായോഗികമല്ലെങ്കിൽ, ഒരു ടാൻജെന്റ് നീളം19
രണ്ട് വളവുകൾക്കിടയിൽ കുറഞ്ഞത് 10 സെക്കൻഡ് യാത്രാ സമയം ഉറപ്പാക്കണം.
ബുദ്ധിമുട്ടുള്ള ടോപ്പോഗ്രാഫിയിൽ കോമ്പൗണ്ട് കർവുകൾ ഉപയോഗിക്കാമെങ്കിലും ഒരൊറ്റ വൃത്താകൃതിയിലുള്ള വക്രത്തിൽ ഉൾപ്പെടുത്തുന്നത് അസാധ്യമാകുമ്പോൾ മാത്രം. ഒരു വക്രത്തിൽ നിന്ന് മറ്റൊന്നിലേക്ക് സുരക്ഷിതവും സുഗമവുമായ മാറ്റം ഉറപ്പാക്കുന്നതിന്, പരന്ന വക്രത്തിന്റെ ദൂരം മൂർച്ചയുള്ള വക്രത്തിന്റെ ആരം അനുപാതത്തിലാകരുത്. 1.5: 1 എന്ന അനുപാതം പരിമിതപ്പെടുത്തുന്ന മൂല്യമായി കണക്കാക്കണം.
കാഴ്ചയിലെ വികലത ഒഴിവാക്കാൻ, റോഡ് ഒരു ത്രിമാന എന്റിറ്റിയാണെന്നും ഒരു പ്ലാനും എൽ-സെക്ഷനും ഉൾക്കൊള്ളുന്നില്ലെന്നും മനസിലാക്കിക്കൊണ്ട് തിരശ്ചീന വിന്യാസം രേഖാംശ പ്രൊഫൈലുമായി ശ്രദ്ധാപൂർവ്വം ഏകോപിപ്പിക്കണം. ഇക്കാര്യത്തിൽ ആവശ്യകതകൾ വിഭാഗം 11 ൽ ചർച്ചചെയ്യുന്നു.
മൊത്തത്തിലുള്ള സാങ്കേതിക സാധ്യത, സമ്പദ്വ്യവസ്ഥ, വിന്യാസത്തിന്റെ ചാഞ്ചാട്ടം, സൗന്ദര്യശാസ്ത്രം എന്നിവ കണക്കിലെടുത്ത് പാലങ്ങളുടെ സ്ഥലവും സമീപനങ്ങളുടെ സ്ഥാനവും ശരിയായി ഏകോപിപ്പിക്കണം. ഇനിപ്പറയുന്ന മാനദണ്ഡങ്ങൾ പൊതുവായി പിന്തുടരാം:
പൊതുവേ, തിരശ്ചീന വളവുകളിൽ ഇരുവശത്തും സർപ്പിള സംക്രമണങ്ങളാൽ ചുറ്റപ്പെട്ട വൃത്താകൃതിയിലുള്ള ഭാഗം അടങ്ങിയിരിക്കണം. രൂപകൽപ്പന വേഗത, സൂപ്പർലീവേഷൻ, സൈഡ് ഘർഷണത്തിന്റെ ഗുണകം എന്നിവ വൃത്താകൃതിയിലുള്ള വളവുകളുടെ രൂപകൽപ്പനയെ ബാധിക്കുന്നു. സെൻട്രിഫ്യൂഗൽ ആക്സിലറേഷന്റെ മാറ്റത്തിന്റെ തോത് അല്ലെങ്കിൽ സൂപ്പർലീവേഷൻ മാറ്റത്തിന്റെ തോത് അടിസ്ഥാനമാക്കിയാണ് പരിവർത്തന വക്രത്തിന്റെ ദൈർഘ്യം നിർണ്ണയിക്കുന്നത്.
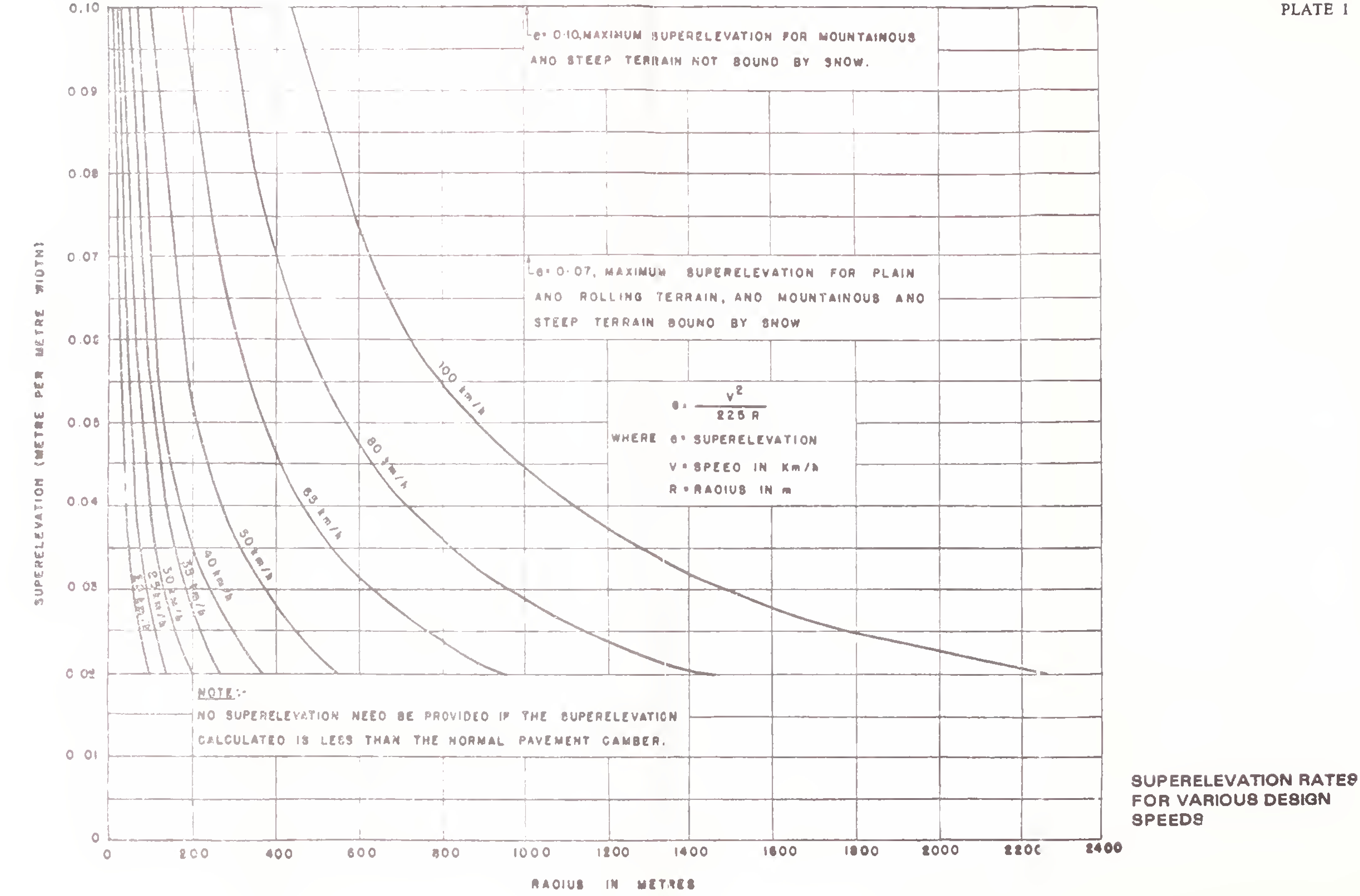
തിരശ്ചീന വളവുകളിൽ ആവശ്യമായ സൂപ്പർലീവേഷൻ ഇനിപ്പറയുന്ന സൂത്രവാക്യത്തിൽ നിന്ന് കണക്കാക്കണം. മൂന്നിൽ നാലാമത്തേതിന് സമാനമായ അപകേന്ദ്രബലം എന്ന് ഇത് അനുമാനിക്കുന്നു20
രൂപകൽപ്പന വേഗത സൂപ്പർലീവേഷൻ വഴിയും ബാക്കി ഭാഗത്തെ സംഘർഷത്താൽ പ്രതിരോധിക്കും:
എവിടെ
e = മീറ്ററിന് മീറ്ററിൽ സൂപ്പർലീവേഷൻ,
വി = മണിക്കൂറിൽ കിലോമീറ്ററിൽ വേഗത, ഒപ്പം
ആർ = മീറ്ററിൽ ദൂരം
മേൽപ്പറഞ്ഞ പദപ്രയോഗത്തിൽ നിന്ന് ലഭിച്ച അധികാരം ഇനിപ്പറയുന്ന മൂല്യങ്ങളിൽ പരിമിതപ്പെടുത്തിയിരിക്കണം:
| (എ) സമതലത്തിലും എണ്ണമയമുള്ള പ്രദേശത്തും | 7 ശതമാനം |
| (ബി) മഞ്ഞുമൂടിയ പ്രദേശങ്ങളിൽ | 7 ശതമാനം |
| (സി) മഞ്ഞുമൂടിയ മലയോര പ്രദേശങ്ങളിൽ | 10 ശതമാനം |
ഈ അടിസ്ഥാനത്തിൽ വിവിധ ഡിസൈൻ വേഗതകൾക്കായുള്ള സൂപ്പർലീവേഷൻ പ്ലേറ്റ് 1 സൂചിപ്പിക്കുന്നു.
9.3.1-ാം വീഡിയോ ലഭിച്ച സൂപ്പർലീവേഷന്റെ മൂല്യം റോഡ് കാംബറിനേക്കാൾ കുറവാണെങ്കിൽ, സാധാരണ കേംബർഡ് വിഭാഗം ഒരു വളർച്ചയും നൽകാതെ വളഞ്ഞ ഭാഗത്ത് തുടരണം. വിവിധ കാംബർ നിരക്കുകൾക്കായുള്ള തിരശ്ചീന വളവുകളുടെ ദൂരം പട്ടിക 15 ൽ കാണിക്കുന്നു, അതിനപ്പുറം സൂപ്പർലീവേഷൻ ആവശ്യമില്ല.
| ഡിസൈൻ വേഗത (കിലോമീറ്റർ / മണിക്കൂർ) | ന്റെ കാംബറിനുള്ള ദൂരം (മീറ്റർ) | ||||
|---|---|---|---|---|---|
| 4 ശതമാനം | 3 ശതമാനം | 2.5 ശതമാനം | രണ്ട് ശതമാനം | 1.7 ശതമാനം | |
| 20 | 50 | 60 | 70 | 90 | 100 |
| 25 | 70 | 90 | 110 | 140 | 150 |
| 30 | 100 | 130 | 160 | 200 | 240 |
| 35 | 140 | 180 | 220 | 270 | 320 |
| 40 | 180 | 240 | 280 | 350 | 420 |
| 50 | 280 | 370 | 450 | 550 | 650 |
| 65 | 470 | 620 | 750 | 950 | 1100 |
| 80 | 700 | 950 | 1100 | 1400 | 1700 |
| 100 | 1100 | 1500 | 1800 | 2200 | 260021 |
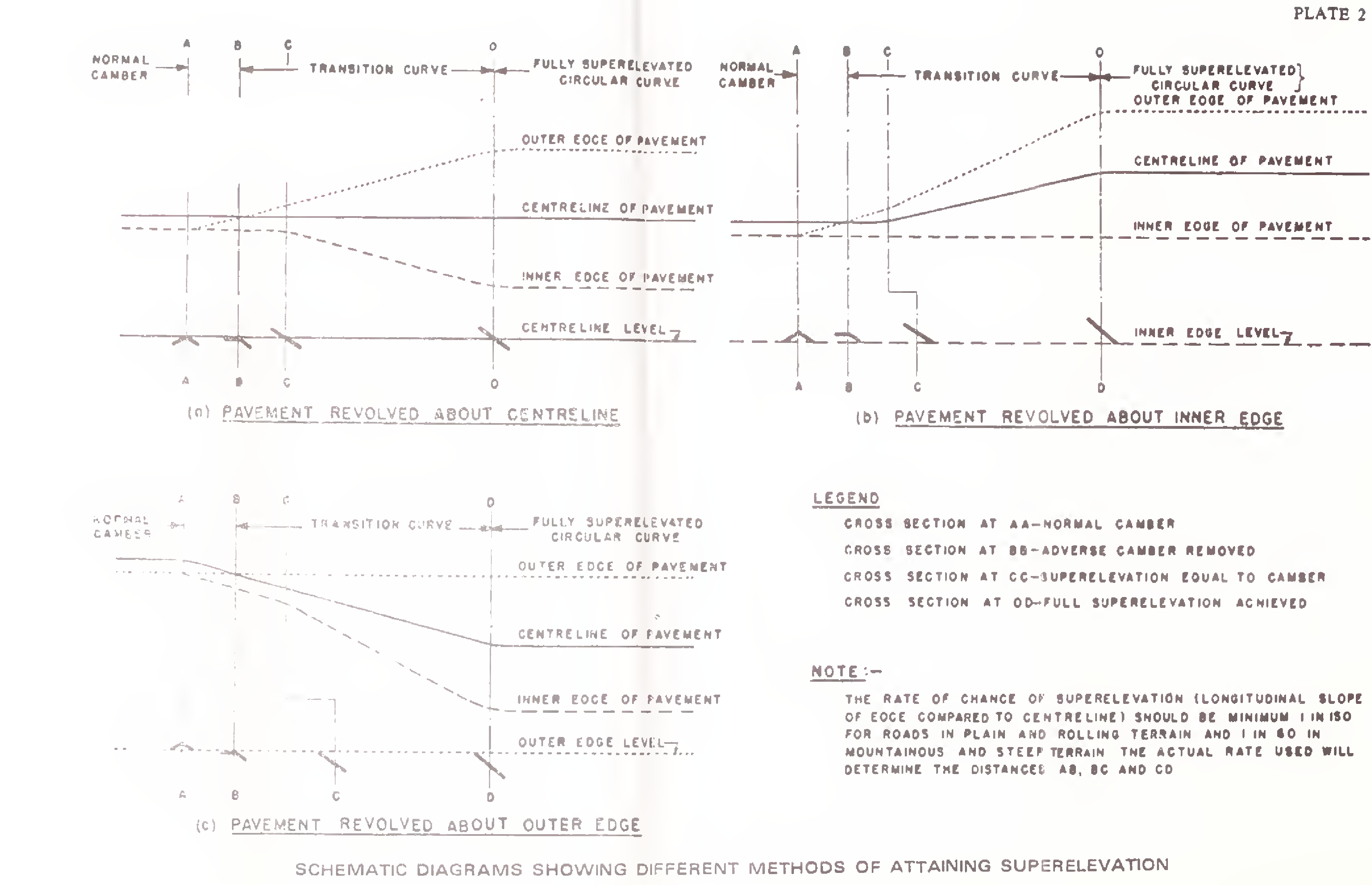
റോഡിന്റെ സാധാരണ കേംബേർഡ് വിഭാഗം രണ്ട് ഘട്ടങ്ങളായി സൂപ്പർലീവേറ്റഡ് വിഭാഗമാക്കി മാറ്റി. നടപ്പാതയുടെ പുറം ഭാഗത്ത് പ്രതികൂല കാംബർ നീക്കം ചെയ്യുന്നതാണ് ആദ്യ ഘട്ടം. രണ്ടാമത്തെ ഘട്ടത്തിൽ, വണ്ടിയുടെ മുഴുവൻ വീതിയിലും സൂപ്പർലീവേഷൻ ക്രമേണ നിർമ്മിക്കപ്പെടുന്നു, അതിനാൽ വൃത്താകൃതിയിലുള്ള വക്രത്തിന്റെ തുടക്കത്തിൽ ആവശ്യമായ സൂപ്പർലീവേഷൻ ലഭ്യമാണ്. മേന്മ കൈവരിക്കുന്നതിന് മൂന്ന് വ്യത്യസ്ത രീതികളുണ്ട്: (i) മധ്യരേഖയെ ചുറ്റിപ്പറ്റിയുള്ള നടപ്പാത; (ii) ആന്തരിക അറ്റത്തെ ചുറ്റുന്ന നടപ്പാത; (iii) പുറം അറ്റത്തെ ചുറ്റുന്ന നടപ്പാത. പ്ലേറ്റ് 2 ഈ രീതികളെ രേഖാചിത്രപരമായി ചിത്രീകരിക്കുന്നു. ഓരോ രേഖാചിത്രത്തിന്റെയും ചുവടെയുള്ള ചെറിയ ക്രോസ്-സെക്ഷനുകൾ വ്യത്യസ്ത പോയിന്റുകളിൽ നടപ്പാതയുടെ ക്രോസ് സ്ലോപ്പ് അവസ്ഥയെ സൂചിപ്പിക്കുന്നു.
മുകളിലുള്ള ഓരോ രീതിയും വ്യത്യസ്ത സാഹചര്യങ്ങളിൽ ബാധകമാണ്. ശാരീരിക നിയന്ത്രണങ്ങളില്ലാത്ത മിക്ക സാഹചര്യങ്ങളിലും നടപ്പാതയുടെ വികലമായ രീതി (i) അനുയോജ്യമാണെന്ന് കണ്ടെത്തുകയും സാധാരണ ഗതിയിൽ അവ സ്വീകരിക്കുകയും ചെയ്യാം. ലോവർ എഡ്ജ് പ്രൊഫൈൽ ഒരു പ്രധാന നിയന്ത്രണമായിരിക്കുന്നിടത്ത് രീതി (ii) അഭികാമ്യമാണ്, ഉദാ. ഡ്രെയിനേജ് കാരണം. മൊത്തത്തിലുള്ള രൂപം മാനദണ്ഡമാകുന്നിടത്ത്, ഡ്രൈവർമാർക്ക് ഏറ്റവും ശ്രദ്ധേയമായ ബാഹ്യ എഡ്ജ് പ്രൊഫൈൽ വികലമാകാത്തതിനാൽ രീതി (iii) നല്ലതാണ്.
സംക്രമണ വക്രത്തിന്റെ മുഴുവൻ നീളത്തിലും സൂപ്പർലീവേഷൻ ക്രമേണ കൈവരിക്കേണ്ടതാണ്, അങ്ങനെ വൃത്താകൃതിയിലുള്ള ഭാഗത്തിന്റെ ആരംഭ ഘട്ടത്തിൽ ഡിസൈൻ സൂപ്പർലീവേഷൻ ലഭ്യമാകും. ഈ അടിസ്ഥാനത്തിൽ പ്ലേറ്റ് 2 ലെ രേഖാചിത്രങ്ങൾ വരച്ചിട്ടുണ്ട്. ചില കാരണങ്ങളാൽ സംക്രമണ വക്രം നൽകാൻ കഴിയാത്ത സാഹചര്യങ്ങളിൽ, വൃത്താകൃതിയിലുള്ള വക്രത്തിന്റെ ആരംഭത്തിന് മുമ്പായി നേരായ ഭാഗത്ത് മൂന്നിലൊന്ന് സൂപ്പർലീവേഷൻ നേടാം, ബാക്കി മൂന്നിലൊന്ന് വളവിലും.
ആവശ്യമായ സൂപ്പർലീവേഷൻ വികസിപ്പിക്കുന്നതിൽ, മധ്യരേഖയുമായി താരതമ്യപ്പെടുത്തുമ്പോൾ നടപ്പാതയുടെ അരികിലെ രേഖാംശ ചരിവ് (അതായത് സൂപ്പർലീവേഷൻ മാറ്റത്തിന്റെ നിരക്ക്) പ്ലെയിൻ, റോളിംഗ് ടെറൈൻസിലെ റോഡുകൾക്ക് 150 ൽ 1 നേക്കാൾ കുത്തനെയല്ലെന്ന് ഉറപ്പാക്കണം. 60-ൽ പർവതപ്രദേശങ്ങളിലും കുത്തനെയുള്ള പ്രദേശങ്ങളിലും.
ക്രോസ്-ഡ്രെയിനേജ് ഘടനകൾ ഒരു തിരശ്ചീന വക്രത്തിൽ വീഴുമ്പോൾ, മുകളിൽ വിവരിച്ച അതേ രീതിയിൽ അവയുടെ ഡെക്ക് സൂപ്പർലീവേറ്റ് ചെയ്യണം.
ഒരു തിരശ്ചീന വക്രത്തിൽ, സൂപ്പർലീവേഷൻ, സൈഡ് ഘർഷണം എന്നിവയുടെ സംയോജിത ഫലങ്ങളാൽ അപകേന്ദ്രബലം സമീകരിക്കുന്നു. ദി22
സന്തുലിതാവസ്ഥയുടെ ഈ അവസ്ഥയുടെ അടിസ്ഥാന സമവാക്യം ഇതാണ്: അല്ലെങ്കിൽ
എവിടെ
| v | = സെക്കൻഡിൽ മീറ്ററിൽ വാഹനത്തിന്റെ വേഗത |
| വി | = മണിക്കൂറിൽ കിലോമീറ്ററിൽ വാഹനത്തിന്റെ വേഗത |
| g | = ഓരോ കാഴ്ചയ്ക്കും മീറ്ററിലെ ഗുരുത്വാകർഷണം മൂലം ത്വരണം2 |
| e | = മീറ്ററിൽ മീറ്ററിലെ സൂപ്പർലീവേഷൻ അനുപാതം |
| f | = വാഹന ടയറുകളും നടപ്പാതയും തമ്മിലുള്ള വശങ്ങളിലെ സംഘർഷത്തിന്റെ ഗുണകം (0.15 ആയി എടുക്കുന്നു) |
| ആർ | = മീറ്ററിൽ ദൂരം |
ഈ സമവാക്യത്തെയും ഖണ്ഡിക 9.3.1 ൽ നൽകിയിട്ടുള്ള സൂപ്പർലീവേഷന്റെ പരമാവധി അനുവദനീയമായ മൂല്യങ്ങളെയും അടിസ്ഥാനമാക്കി. റൂളിംഗ് മിനിമം, കേവല മിനിമം ഡിസൈൻ വേഗത എന്നിവയുമായി ബന്ധപ്പെട്ട തിരശ്ചീന വളവുകൾക്കുള്ള ദൂരം പട്ടിക 16 ൽ കാണിച്ചിരിക്കുന്നു.
പുതിയ റോഡുകളിൽ, ഏറ്റവും വലിയ പ്രായോഗിക ദൂരം ലഭിക്കുന്നതിന് തിരശ്ചീന വളവുകൾ രൂപകൽപ്പന ചെയ്യണം; റൂളിംഗ് ഡിസൈൻ വേഗതയുമായി ബന്ധപ്പെട്ട മൂല്യങ്ങളേക്കാൾ കൂടുതൽ (പട്ടിക 16 കാണുക). എന്നിരുന്നാലും, നിർമ്മാണത്തിന്റെ സാമ്പത്തികശാസ്ത്രമോ സൈറ്റ് അവസ്ഥകളോ നിർദ്ദേശിച്ചാൽ മിനിമം ഡിസൈൻ വേഗത (പട്ടിക 16) അടിസ്ഥാനമാക്കിയുള്ള കേവല മിനിമം മൂല്യങ്ങൾ അവലംബിച്ചേക്കാം. നിലവിലുള്ള റോഡുകൾ മെച്ചപ്പെടുത്തുമ്പോൾ, മറ്റ് ചില കാരണങ്ങളാൽ റോഡ് പുനർനിർമ്മിക്കേണ്ട ആവശ്യമില്ലെങ്കിൽ, കേവല മിനിമം മാനദണ്ഡങ്ങൾക്ക് അനുസൃതമായി റേഡിയുള്ള കർവുകൾ പരന്നതാകില്ല.
ഒരു വാഹനത്തിന് നേരായ ഭാഗത്ത് നിന്ന് വൃത്താകൃതിയിലുള്ള വളവിലേക്ക് സുഗമമായി പ്രവേശിക്കാൻ പരിവർത്തന വളവുകൾ ആവശ്യമാണ്. ട്രാൻസിഷൻ കർവുകൾ റോഡിന്റെ സൗന്ദര്യാത്മക ഭാവം മെച്ചപ്പെടുത്തുന്നു, കൂടാതെ സൂപ്പർലീവേഷന്റെ ഗ്രേഡൽ ആപ്ലിക്കേഷനും ആവശ്യമായ വണ്ടിയുടെ അധിക വീതിയും അനുവദിക്കുക. തിരശ്ചീന വളവുകളിൽ. ഈ ആവശ്യത്തിനായി സർപ്പിള കർവ് ഉപയോഗിക്കണം.
സംക്രമണ വക്രത്തിന്റെ കുറഞ്ഞ ദൈർഘ്യം ഇനിപ്പറയുന്ന രണ്ട് പരിഗണനകളിൽ നിന്നും ഡിസൈനിനായി സ്വീകരിച്ച രണ്ട് മൂല്യങ്ങളിൽ വലുതും നിർണ്ണയിക്കണം.23
| റോഡിന്റെ വർഗ്ഗീകരണം | സമതലപ്രദേശം | റോളിംഗ് ഭൂപ്രദേശം | പർവതപ്രദേശം | കുത്തനെയുള്ള ഭൂപ്രദേശം | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| മഞ്ഞ് ബാധിക്കാത്ത പ്രദേശങ്ങൾ | മഞ്ഞുമൂടിയ പ്രദേശങ്ങൾ | മഞ്ഞ് ബാധിക്കാത്ത പ്രദേശങ്ങൾ | മഞ്ഞുമൂടിയ പ്രദേശങ്ങൾ | |||||||||
| കുറഞ്ഞത് നിയന്ത്രിക്കുന്നു | സമ്പൂർണ്ണ മിനിമം | കുറഞ്ഞത് നിയന്ത്രിക്കുന്നു | സമ്പൂർണ്ണ മിനിമം | കുറഞ്ഞത് നിയന്ത്രിക്കുന്നു | സമ്പൂർണ്ണ മിനിമം | കുറഞ്ഞത് നിയന്ത്രിക്കുന്നു | സമ്പൂർണ്ണ മിനിമം | കുറഞ്ഞത് നിയന്ത്രിക്കുന്നു | സമ്പൂർണ്ണ മിനിമം | കുറഞ്ഞത് നിയന്ത്രിക്കുന്നു | സമ്പൂർണ്ണ മിനിമം | |
| 1. ദേശീയപാതകളും സംസ്ഥാനപാതകളും | 360 | 230 | 230 | 155 | 80 | 50 | 90 | 60 | 50 | 30 | 60 | 33 |
| 2. പ്രധാന ജില്ലാ റോഡുകൾ | 230 | 155 | 155 | 90 | 50 | 30 | 60 | 33 | 30 | 14 | 33 | 15 |
| 3. മറ്റ് ജില്ലാ റോഡുകൾ | 155 | 90 | 90 | 60 | 30 | 20 | 33 | 23 | 20 | 14 | 23 | 15 |
| 4. ഗ്രാമ റോഡുകൾ | 90 | 60 | 60 | 45 | 20 | 14 | 23 | 15 | 20 | 14 | 23 | 15 |
|
കുറിപ്പുകൾ: 1. പട്ടിക മിനിമം, റൂളിംഗ് മിനിമം റേഡിയുകൾ യഥാക്രമം മിനിമം ഡിസൈൻ വേഗതയ്ക്കും റൂളിംഗ് ഡിസൈൻ വേഗതയ്ക്കും യോജിക്കുന്നു. 2. ആപ്ലിക്കേഷനിലെ മാർഗ്ഗനിർദ്ദേശത്തിനായി, ഖണ്ഡിക 9.4.2 കാണുക.24 | ||||||||||||
(i) അപകേന്ദ്ര ആക്സിലറേഷന്റെ മാറ്റത്തിന്റെ നിരക്ക് ഡ്രൈവർമാർക്ക് അസ്വസ്ഥത ഉണ്ടാക്കരുത്. ഈ പരിഗണനയിൽ നിന്ന്, പരിവർത്തന വക്രത്തിന്റെ ദൈർഘ്യം നൽകുന്നത്:
എവിടെ
എൽ8 = മീറ്ററിലെ പരിവർത്തന ദൈർഘ്യം
വി = മണിക്കൂറിൽ കിലോമീറ്ററിൽ വേഗത
ആർ = മീറ്ററിൽ വൃത്താകൃതിയിലുള്ള വക്രത്തിന്റെ ദൂരം
 (പരമാവധി 0.8 നും കുറഞ്ഞത് 0.5 നും വിധേയമായി)
(പരമാവധി 0.8 നും കുറഞ്ഞത് 0.5 നും വിധേയമായി)
(ii) സൂപ്പർലീവേഷൻ മാറ്റത്തിന്റെ നിരക്ക് (അതായത്, മധ്യനിരയിലെ ഗ്രേഡുമായി താരതമ്യപ്പെടുത്തുമ്പോൾ നടപ്പാതയുടെ അറ്റത്ത് വികസിപ്പിച്ച രേഖാംശ ഗ്രേഡ്) യാത്രക്കാർക്ക് അസ്വസ്ഥത ഉണ്ടാക്കാതിരിക്കുകയോ റോഡ് വൃത്തികെട്ടതായി കാണപ്പെടാതിരിക്കുകയോ ചെയ്യണം. മാറ്റത്തിന്റെ നിരക്ക് പ്ലെയിൻ, റോളിംഗ് ടെറൈനുകളിലെ റോഡുകൾക്ക് 150 ൽ 1 എന്നതിലും കുത്തനെയുള്ള / കുത്തനെയുള്ള ഭൂപ്രദേശങ്ങളിൽ 60 ൽ 1 എന്നതിലും കുത്തനെയുള്ളതായിരിക്കരുത്. ഈ അടിസ്ഥാനത്തിൽ പരിവർത്തനത്തിന്റെ ഏറ്റവും കുറഞ്ഞ ദൈർഘ്യത്തിനുള്ള സൂത്രവാക്യങ്ങൾ ഇവയാണ്:
പ്ലെയിൻ, റോളിംഗ് ഭൂപ്രദേശങ്ങൾക്കായി:
പർവത, കുത്തനെയുള്ള ഭൂപ്രദേശത്തിന്:
മേൽപ്പറഞ്ഞ പരിഗണനകൾ കണക്കിലെടുക്കുമ്പോൾ, വ്യത്യസ്ത വേഗതകൾക്കും കർവ് റേഡിയുകൾക്കുമായുള്ള ഏറ്റവും കുറഞ്ഞ സംക്രമണ ദൈർഘ്യം പട്ടിക 17 ൽ നൽകിയിരിക്കുന്നു.
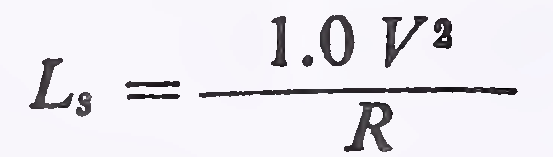
സംയോജിത വൃത്താകൃതി, സംക്രമണ വളവുകളുടെ ഘടകങ്ങൾ ചിത്രം 2. ൽ കാണിച്ചിരിക്കുന്നു. ഷിഫ്റ്റ്, ടാൻജെന്റ് ദൂരം, അഗ്രം ദൂരം മുതലായ വ്യക്തിഗത ഘടകങ്ങളുടെ മൂല്യങ്ങൾ നേടുന്നതിനും ഫീൽഡിൽ വളവുകൾ സ്ഥാപിക്കുന്നതിന് കോർഡിനേറ്റുകൾ പ്രവർത്തിപ്പിക്കുന്നതിനും ഇത് ഉപയോഗിക്കാൻ സൗകര്യപ്രദമാണ് കർവ് പട്ടികകൾ. ഇതിനായി, റഫറൻസ് നൽകാംIRC: 38 “ഹൈവേകൾക്കായുള്ള തിരശ്ചീന വളവുകൾക്കായി ഡിസൈൻ പട്ടികകൾ”.
മൂർച്ചയുള്ള തിരശ്ചീന വളവുകളിൽ, വാഹനങ്ങൾ സുരക്ഷിതമായി കടന്നുപോകുന്നതിന് വണ്ടിയുടെ വീതി വീതികൂട്ടേണ്ടത് ആവശ്യമാണ്. ആവശ്യമായ വീതികൂട്ടലിന് രണ്ട് ഘടകങ്ങളുണ്ട്: (i) മെക്കാനിക്കൽ വീതികൂട്ടൽ25
| സമതലവും ഉരുളുന്നതുമായ ഭൂപ്രദേശം | മലയോരവും കുത്തനെയുള്ളതുമായ ഭൂപ്രദേശം | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| കർവ് ദൂരം R (മീറ്റർ) |
ഡിസൈൻ വേഗത (കിലോമീറ്റർ / മണിക്കൂർ) | കർവ് ദൂരം (മീറ്റർ) |
ഡിസൈൻ വേഗത (കിലോമീറ്റർ / മണിക്കൂർ) | |||||||||
| 100 | 80 | 65 | 50 | 40 | 35 | 50 | 40 | 30 | 25 | 20 | ||
| സംക്രമണ നീളം - മീറ്റർ | സംക്രമണ നീളം - മീറ്റർ | |||||||||||
| 45 | NA | 70 | 14 | NA | 30 | |||||||
| 60 | NA | 75 | 55 | 20 | 35 | 20 | ||||||
| 90 | 75 | 50 | 40 | 25 | NA | 25 | 20 | |||||
| 100 | NA | 70 | 45 | 35 | 30 | 30 | 25 | 15 | ||||
| 150 | 80 | 45 | 30 | 25 | 40 | NA | 25 | 20 | 15 | |||
| 170 | 70 | 40 | 25 | 20 | 50 | 40 | 20 | 15 | 15 | |||
| 200 | NA | 60 | 35 | 25 | 20 | 55 | 40 | 20 | 15 | 15 | ||
| 240 | 90 | 50 | 30 | 20 | NR | 70 | NA | 30 | 15 | 15 | 15 | |
| 300 | NA | 75 | 40 | 25 | NR | 80 | 55 | 25 | 15 | 15 | NR | |
| 360 | 130 | 60 | 35 | 20 | 90 | 45 | 25 | 15 | 15 | |||
| 400 | 115 | 55 | 30 | 20 | 100 | 45 | 20 | 15 | 15 | |||
| 500 | 95 | 45 | 25 | NR | 125 | 35 | 15 | 15 | NR | |||
| 600 | 80 | 35 | 20 | 150 | 30 | 15 | 15 | |||||
| 700 | 70 | 35 | 20 | 170 | 25 | 15 | NR | |||||
| 800 | 60 | 30 | NR | 200 | 20 | 15 | ||||||
| 900 | 55 | 30 | 250 | 15 | 15 | |||||||
| 1000 | 50 | 30 | 300 | 15 | NR | |||||||
| 1200 | 40 | NR | 400 | 15 | ||||||||
| 1500 | 35 | 500 | NR | |||||||||
| 1800 | 30 | |||||||||||
| 2000 | NR | |||||||||||
|
NA-ബാധകമല്ല NRTrans പരിവർത്തനം ആവശ്യമില്ല26 | ||||||||||||
ചിത്രം 2. സംയോജിത വൃത്താകൃതി, സംക്രമണ വക്രത്തിന്റെ ഘടകങ്ങൾ27
പിൻ ചക്രങ്ങളുടെ ട്രാക്കിംഗ് കാരണം ഒരു വാഹനം വളവിൽ അധിക വീതി നിശ്ചയിക്കുക, (ii) ഒരു പാതയിലെ വാഹനങ്ങൾ നേരായ ദൂരത്തേക്കാൾ കൂടുതൽ വളവുകളിൽ അലഞ്ഞുതിരിയുന്നതിനാൽ വാഹനങ്ങൾ എളുപ്പത്തിൽ കടക്കാൻ അനുവദിക്കുന്നതിനുള്ള മന psych ശാസ്ത്രപരമായ വീതികൂട്ടൽ.
രണ്ട് പാതകളിലോ വിശാലമായ റോഡുകളിലോ, രണ്ടും മുകളിൽ പറഞ്ഞ ഘടകങ്ങൾ പൂർണ്ണമായും പാലിക്കേണ്ടതുണ്ട്, അതിനാൽ വളവുകളിലെ വാഹനങ്ങൾ തമ്മിലുള്ള ലാറ്ററൽ ക്ലിയറൻസ് സ്ട്രൈറ്റുകളിൽ ലഭ്യമായ ക്ലിയറൻസിന് തുല്യമായി നിലനിർത്തുന്നു. എന്നിരുന്നാലും സിംഗിൾ-ലെയ്ൻ റോഡുകളുടെ സ്ഥാനം അല്പം വ്യത്യസ്തമാണ്, കാരണം കുസൃതികൾ കടക്കുമ്പോൾ വാഹനങ്ങളുടെ പുറം ചക്രങ്ങൾ ഏത് സാഹചര്യത്തിലും നേരായോ വളഞ്ഞോ ആണെങ്കിലും തോളുകൾ ഉപയോഗിക്കാൻ കഴിയും. വീതികൂട്ടലിന്റെ മെക്കാനിക്കൽ ഘടകം മാത്രം കണക്കിലെടുക്കുകയാണെങ്കിൽ സിംഗിൾ-ലെയ്ൻ റോഡുകളിൽ ഇത് മതിയാകും.
മേൽപ്പറഞ്ഞ പരിഗണനകളെ അടിസ്ഥാനമാക്കി, സിംഗിൾ, ടു-ലെയിൻ റോഡുകളിൽ തിരശ്ചീന വളവുകളിൽ നൽകേണ്ട വണ്ടിയുടെ അധിക വീതി പട്ടിക 18 ൽ നൽകിയിരിക്കുന്നു. മൾട്ടി-ലെയ്ൻ റോഡുകൾക്ക്, നടപ്പാത വീതി കൂട്ടുന്നത് രണ്ട് വീതിയിൽ പകുതി വീതി ചേർത്ത് കണക്കാക്കാം. ഓരോ പാതയിലേക്കുള്ള പാതകൾ.
|
വക്രത്തിന്റെ ദൂരം (മീ) അധിക വീതി (മീ) |
20 വരെ | 21 മുതൽ 40 വരെ | 41 മുതൽ 60 വരെ | 61 മുതൽ 100 വരെ | 101 മുതൽ 300 വരെ | 300 ന് മുകളിൽ |
|---|---|---|---|---|---|---|
| ടു-ലെയ്ൻ | 1.5 | 1.5 | 1.2 | 0.9 | 0.6 | ഇല്ല |
| ഒറ്റവരി | 0.9 | 0.6 | 0.6 | ഇല്ല | ഇല്ല | ഇല്ല |
സംക്രമണ വക്രത്തിനൊപ്പം വീതി ഏകദേശം ഏകീകൃത നിരക്കിൽ വർദ്ധിപ്പിച്ചുകൊണ്ട് വീതി കൂട്ടണം. വൃത്താകൃതിയിലുള്ള വക്രത്തിന്റെ മുഴുവൻ നീളത്തിലും അധിക വീതി തുടരണം. പരിവർത്തനമില്ലാത്ത വളവുകളിൽ, സൂപ്പർലീവേഷൻ പോലെ തന്നെ വീതികൂട്ടൽ നേടണം, അതായത്, വക്രത ആരംഭിക്കുന്നതിന് മുമ്പായി മൂന്നിലൊന്ന് നേരായ ഭാഗത്ത് നേടുകയും മൂന്നിലൊന്ന് വക്രത്തിൽ നേടുകയും വേണം.
വീതികൂട്ടൽ വണ്ടിയുടെ ഇരുവശത്തും തുല്യമായി പ്രയോഗിക്കണം, അല്ലാതെ കുന്നിൻ റോഡുകളിൽ മുഴുവൻ വീതിയും ഉള്ളിൽ മാത്രം ചെയ്താൽ നല്ലതാണ്. അതുപോലെ, വക്രത പ്ലെയിൻ വൃത്താകൃതിയിലായിരിക്കുമ്പോഴും സംക്രമണം ഇല്ലാതിരിക്കുമ്പോഴും അകത്ത് മാത്രം വീതി നൽകണം.28
മധ്യരേഖയിലേക്ക് റേഡിയൽ ഓഫ്സെറ്റുകൾ വഴി അധിക വീതികൂട്ടൽ നേടാം. നടപ്പാതയുടെ എഡ്ജ് ലൈനുകൾ മിനുസമാർന്നതാണെന്നും വ്യക്തമായ കിങ്ക് ഇല്ലെന്നും ഉറപ്പാക്കണം.
തിരശ്ചീന വളവുകളുടെ ഉള്ളിലുടനീളം ആവശ്യമായ കാഴ്ച ദൂരം ലഭ്യമായിരിക്കണം. മതിലുകൾ, മുറിച്ച ചരിവുകൾ, കെട്ടിടങ്ങൾ, വനപ്രദേശങ്ങൾ, ഉയർന്ന കാർഷിക വിളകൾ എന്നിവ പോലുള്ള തടസ്സങ്ങൾ കാരണം പാർശ്വസ്ഥ ദിശയിൽ ദൃശ്യപരതയുടെ അഭാവം ഉണ്ടാകാം. റോഡ് സെന്റർ ലൈനിൽ നിന്നുള്ള ദൂരം ആവശ്യമായ ദൃശ്യപരത ഉറപ്പുവരുത്തുന്നതിന് തടസ്സങ്ങൾ മായ്ക്കണം, അതായത് “ സെറ്റ്-ബാക്ക് ദൂരം ”, ഖണ്ഡിക 9.7.2 ൽ വിവരിച്ചിരിക്കുന്ന വീഡിയോ നടപടിക്രമം കണക്കാക്കാം. ചില സാഹചര്യങ്ങളിൽ, വിന്യാസം, റോഡ് ക്രോസ്-സെക്ഷൻ, തടസ്സങ്ങളുടെ തരം, സ്ഥാനം എന്നിവയിലെ വ്യത്യാസങ്ങൾ കാരണം, ക്ലിയറൻസിന്റെ പരിധി നിർണ്ണയിക്കാൻ ഫീൽഡ് അളവുകൾ അവലംബിക്കേണ്ടത് ആവശ്യമാണ്.
സെറ്റ്-ബാക്ക് ദൂരം ഇനിപ്പറയുന്ന സമവാക്യത്തിൽ നിന്ന് കണക്കാക്കുന്നു (നിർവചനങ്ങൾക്കായി ചിത്രം 3 കാണുക):
എവിടെ
മീ = മീറ്ററിലെ കാഴ്ച തടസ്സത്തിലേക്കുള്ള ഏറ്റവും കുറഞ്ഞ സെറ്റ്-ബാക്ക് ദൂരം (റോഡിന്റെ മധ്യരേഖയിൽ നിന്ന് കണക്കാക്കുന്നു);
ആർ = റോഡിന്റെ മധ്യരേഖയിലെ ദൂരം മീറ്ററിൽ;
n = റോഡിന്റെ മധ്യരേഖയ്ക്കും അകത്തെ പാതയുടെ മധ്യരേഖയ്ക്കും ഇടയിലുള്ള ദൂരം മീറ്ററിൽ; ഒപ്പം
എസ് = മീറ്ററിലെ കാഴ്ച ദൂരം
മുകളിലുള്ള സമവാക്യത്തിൽ, ആന്തരിക പാതയുടെ മധ്യത്തിൽ കാഴ്ച ദൂരം അളക്കുന്നു. സിംഗിൾ-ലെയ്ൻ റോഡുകളിൽ, കാഴ്ചയുടെ ദൂരം റോഡിന്റെ മധ്യരേഖയിലൂടെ അളക്കുകയും ′ n 'പൂജ്യമായി കണക്കാക്കുകയും ചെയ്യുന്നു.
മുകളിലുള്ള സമവാക്യത്തെ അടിസ്ഥാനമാക്കി, സുരക്ഷിതമായ സ്റ്റോപ്പിംഗ് കാഴ്ച ദൂരത്തിന് അനുയോജ്യമായ സെറ്റ്ബാക്ക് ദൂരത്തിനായുള്ള ഡിസൈൻ ചാർട്ടുകൾ ചിത്രം 4 ൽ നൽകിയിരിക്കുന്നു.
മറികടക്കുന്നതിനോ അല്ലെങ്കിൽ ഇന്റർമീഡിയറ്റ് കാഴ്ചാ ദൂരത്തിനോ ഉള്ള സെറ്റ്-ബാക്ക് ദൂരം സമാനമായി കണക്കാക്കാം, പക്ഷേ ആവശ്യമായ ക്ലിയറൻസ് വളരെ പരന്ന വളവുകളൊഴികെ സാമ്പത്തികമായി പ്രായോഗികമാകാൻ കഴിയാത്തത്ര വലുതാണ്.
തിരശ്ചീന വക്രത്തിന്റെ അകത്ത് ഒരു കട്ട് ചരിവ് ഉള്ളപ്പോൾ, കാഴ്ചയുടെ രേഖയുടെ ശരാശരി ഉയരം ക്ലിയറൻസിന്റെ വ്യാപ്തി നിർണ്ണയിക്കുന്നതിനുള്ള ഏകദേശമായി ഉപയോഗിക്കാം. കാഴ്ച നിർത്തുന്നതിന്29
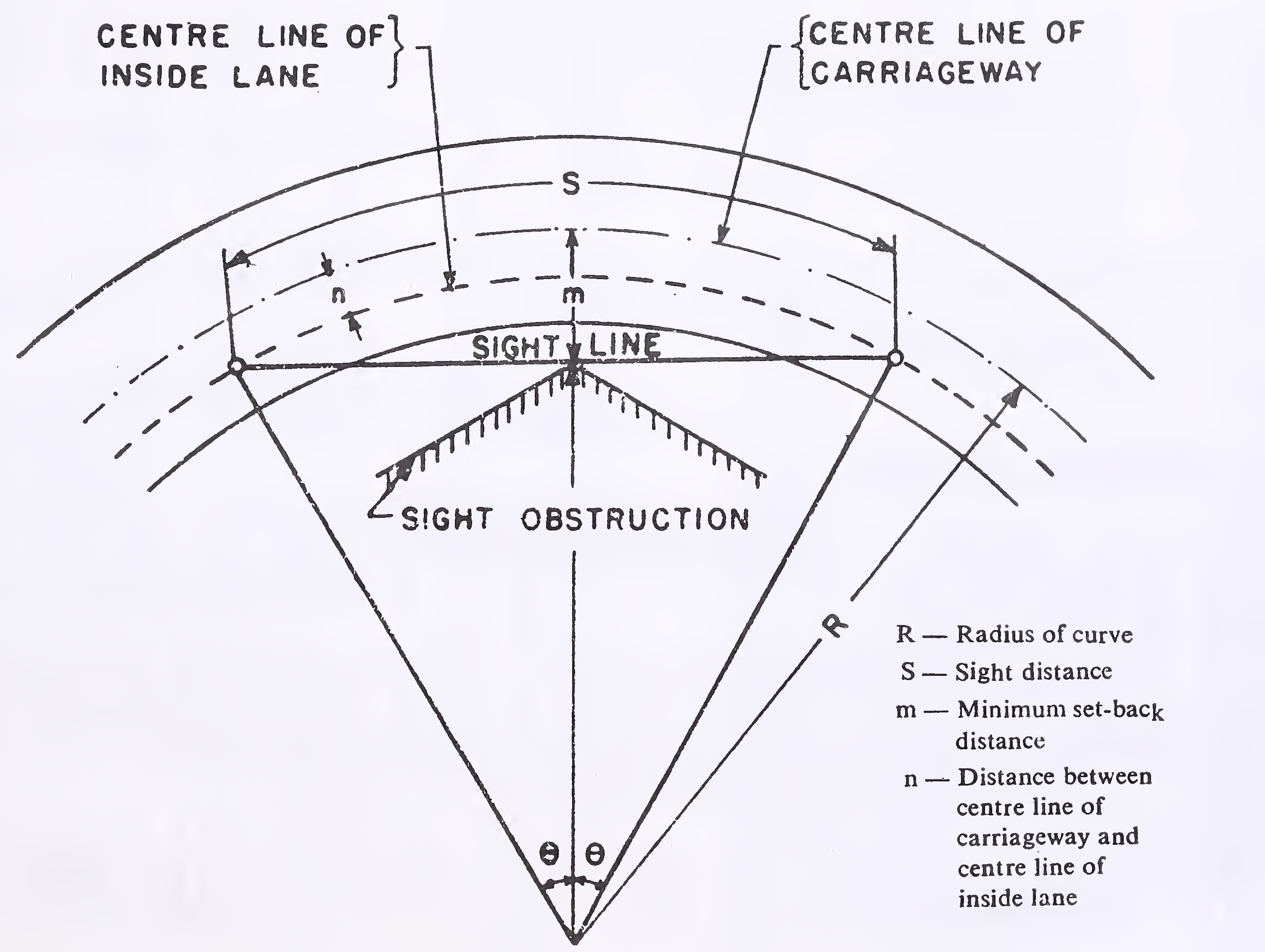
ചിത്രം 3. തിരശ്ചീന വളവുകളിൽ ദൃശ്യപരത30
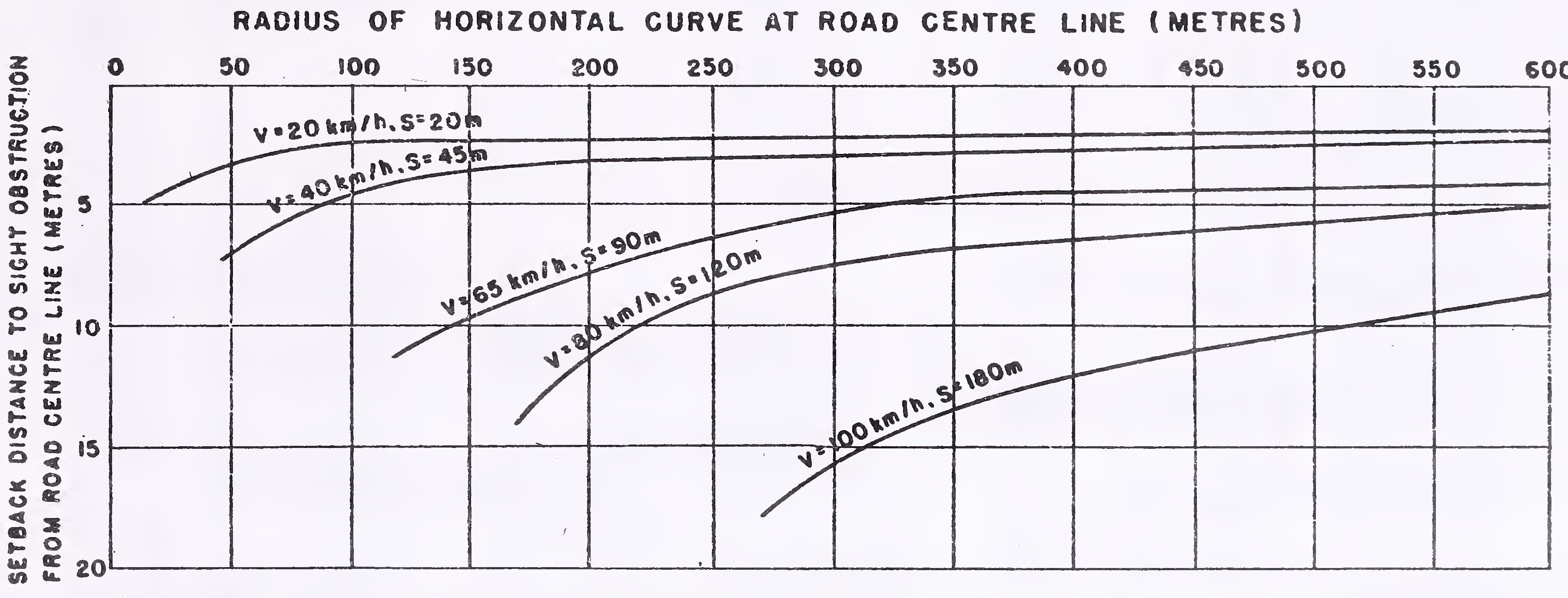
ചിത്രം 4. കാഴ്ചയുടെ ദൂരം സുരക്ഷിതമായി നിർത്തുന്നതിന് തിരശ്ചീന വളവുകളിൽ കുറഞ്ഞ സെറ്റ്-ബാക്ക് ദൂരം ആവശ്യമാണ്31
ദൂരം, ഇത് രൂപകൽപ്പനയുടെ ഏറ്റവും കുറഞ്ഞ ആവശ്യകതയാണ്, ശരാശരി ഉയരം 0.7 മീ. കട്ട് ചരിവുകൾ ഈ ഉയരത്തേക്കാൾ താഴെയായി സെറ്റ്-ബാക്ക് ഡിസ്റ്റൻസ് എൻവലപ്പ് നിർണ്ണയിക്കുന്നു, ഒന്നുകിൽ ചരിവ് മുറിക്കുകയോ അല്ലെങ്കിൽ ബെഞ്ചുചെയ്യുകയോ ചെയ്യുക. ഇന്റർമീഡിയറ്റ് അല്ലെങ്കിൽ മറികടക്കുന്ന കാഴ്ച ദൂരത്തിന്റെ കാര്യത്തിൽ, നിലത്തിന് മുകളിലുള്ള കാഴ്ച രേഖയുടെ ഉയരം 1.2 മീ.
തിരശ്ചീനവും കൊടുമുടിയുമായ ലംബ കർവുകൾ ഓവർലാപ്പ് ചെയ്യുന്നിടത്ത്, നടപ്പാതയിലൂടെ ലംബ ദിശയിലും വക്രത്തിന്റെ അകത്തെ തിരശ്ചീന ദിശയിലും ആവശ്യമായ കാഴ്ച ദൂരം ഡിസൈൻ നൽകണം.
മലയോര പ്രദേശങ്ങളിൽ റോഡിന്റെ ദിശ തിരിയുന്ന വളവുകൾ ഒഴിവാക്കുന്നത് ബുദ്ധിമുട്ടാണ്. ഹെയർ-പിൻ വളവുകൾ എന്നറിയപ്പെടുന്ന അത്തരം വളവുകളുടെ ഡിസൈൻ മാനദണ്ഡങ്ങൾ 'പാരാ 10.5' ൽ കൈകാര്യം ചെയ്യുന്നു.
റോഡിന്റെ വിഭാഗത്തിനും ഭൂപ്രദേശത്തിന്റെ ക്രമീകരണത്തിനും അനുസൃതമായി സുഗമമായ രേഖാംശ പ്രൊഫൈലിനായി ലംബ വിന്യാസം നൽകണം. പ്രൊഫൈലിൽ കിങ്കുകൾക്കും വിഷ്വൽ നിർത്തലാക്കലിനും കാരണമാകുന്ന തരത്തിൽ ഗ്രേഡ് മാറ്റങ്ങൾ പതിവായിരിക്കരുത്. 150 മീറ്ററിനുള്ളിൽ ഗ്രേഡിൽ മാറ്റമുണ്ടാകരുത്.
അല്ലാത്തപക്ഷം തുടർച്ചയായ പ്രൊഫൈലിനുള്ളിൽ ഒരു ഹ്രസ്വ വാലി കർവ് അഭികാമ്യമല്ല, കാരണം ഇത് കാഴ്ചപ്പാട് കാഴ്ചയെ വളച്ചൊടിക്കുകയും അപകടകരമാക്കുകയും ചെയ്യും.
ബ്രോക്കൺ-ബാക്ക് ഗ്രേഡ് ലൈനുകൾ, അതായത്, ഒരേ ദിശയിലുള്ള രണ്ട് ലംബ കർവുകൾ ഒരു ഹ്രസ്വ ടാൻജെന്റ് കൊണ്ട് വേർതിരിച്ചിരിക്കുന്നു, മോശം രൂപം കാരണം ഒഴിവാക്കുകയും ഒരു നീളമുള്ള കർവ് ഉപയോഗിച്ച് പകരം വയ്ക്കുകയും വേണം.
ചെറിയ ക്രോസ്-ഡ്രെയിനേജ് ഘടനകളുടെ ഡെക്കുകൾ, (അതായത് കൽവർട്ടുകളും ചെറിയ പാലങ്ങളും) ഗ്രേഡ് ലൈനിൽ ഒരു ഇടവേളയുമില്ലാതെ, ഫ്ലാൻകിംഗ് റോഡ് സെക്ഷന്റെ അതേ പ്രൊഫൈൽ പിന്തുടരണം.
രേഖാംശ പ്രൊഫൈൽ തിരശ്ചീന വിന്യാസവുമായി യോജിച്ച് ഏകോപിപ്പിക്കണം. ഇത് വിഭാഗം II ൽ ചർച്ചചെയ്യുന്നു.
ഡിസൈൻ വേഗത, ഭൂപ്രദേശത്തിന്റെ അവസ്ഥ, പ്രതീക്ഷിക്കുന്ന ട്രാഫിക്കിന്റെ സ്വഭാവം എന്നിവ കണക്കിലെടുത്ത് ഗ്രേഡുകൾ ശ്രദ്ധാപൂർവ്വം തിരഞ്ഞെടുക്കണം32
റോഡിൽ. ഗ്രേഡിയന്റുകൾ പിന്നീട് പരന്നത് പ്രയാസകരവും ചെലവേറിയതുമാണ്.
വിവിധ തരം ഭൂപ്രദേശങ്ങൾക്കായുള്ള ശുപാർശിത ഗ്രേഡിയന്റുകൾ പട്ടിക 19 ൽ നൽകിയിരിക്കുന്നു.
| എസ്. | ഭൂപ്രദേശം | റൂളിംഗ് ഗ്രേഡിയന്റ് | ഗ്രേഡിയന്റ് പരിമിതപ്പെടുത്തുന്നു | അസാധാരണമായ ഗ്രേഡിയന്റ് |
|---|---|---|---|---|
| 1. | പ്ലെയിൻ അല്ലെങ്കിൽ റോളിംഗ് | 3.3 ശതമാനം (30 ൽ 1) |
5 ശതമാനം (20 ൽ 1) |
6.7 ശതമാനം (15 ൽ 1) |
| 2. | സമുദ്രനിരപ്പിൽ നിന്ന് 3,000 മീറ്ററിൽ കൂടുതൽ ഉയരമുള്ള പർവതപ്രദേശങ്ങളും കുത്തനെയുള്ള ഭൂപ്രദേശവും | 5 ശതമാനം (20 ൽ 1) |
6 ശതമാനം (16.7 ൽ 1) |
7 ശതമാനം (14.3 ൽ 1) |
| 3. | 3,000 മീറ്റർ വരെ കുത്തനെയുള്ള ഭൂപ്രദേശം സമുദ്രത്തിന് മുകളിലുള്ള ഉയരം ലെവൽ |
6 ശതമാനം (16.7 ൽ 1) |
7 ശതമാനം (14.3 ൽ 1) |
എട്ട് ശതമാനം (12.5 ൽ 1) |
‘റൂളിംഗ് ഗ്രേഡിയന്റ്’ വരെയുള്ള ഗ്രേഡിയന്റുകൾ രൂപകൽപ്പനയിൽ തീർച്ചയായും ഉപയോഗിക്കാം. എന്നിരുന്നാലും, പരന്ന രാജ്യത്തിലെ ഒറ്റപ്പെട്ട ഓവർ ബ്രിഡ്ജുകൾ അല്ലെങ്കിൽ സാവധാനത്തിൽ നീങ്ങുന്ന ട്രാഫിക് വഹിക്കുന്ന റോഡുകൾ പോലുള്ള പ്രത്യേക സാഹചര്യങ്ങളിൽ, സൗന്ദര്യശാസ്ത്രം, ട്രാഫിക് പ്രവർത്തനങ്ങൾ, സുരക്ഷ എന്നിവയുടെ കോണിൽ നിന്ന് 2 ശതമാനം ഫ്ലാറ്റർ ഗ്രേഡിയന്റ് സ്വീകരിക്കുന്നത് അഭികാമ്യമാണ്.
ഒരു സ്ഥലത്തിന്റെ ഭൂപ്രകൃതി ഈ കോഴ്സിനെ നിർബന്ധിക്കുന്നിടത്ത് അല്ലെങ്കിൽ സ ent മ്യമായ ഗ്രേഡിയന്റുകളുടെ ദത്തെടുക്കൽ ചിലവ് വർദ്ധിപ്പിക്കും. അത്തരം സാഹചര്യങ്ങളിൽ, റൂളിംഗ് ഗ്രേഡിയന്റിനേക്കാൾ തുടർച്ചയായ ഗ്രേഡ് കുത്തനെയുള്ള നീളം കഴിയുന്നത്ര ചെറുതായിരിക്കണം.
‘അസാധാരണമായ ഗ്രേഡിയന്റുകൾ’ എന്നത് വളരെ പ്രയാസകരമായ സാഹചര്യങ്ങളിൽ മാത്രം സ്വീകരിക്കാനും ഹ്രസ്വ ദൈർഘ്യത്തിൽ 100 മീറ്ററിൽ കൂടാത്ത നീളത്തിൽ സ്വീകരിക്കാനും ഉദ്ദേശിച്ചുള്ളതാണ്. പർവ്വതവും കുത്തനെയുള്ളതുമായ പ്രദേശങ്ങളിൽ, അസാധാരണമായ ഗ്രേഡിയന്റുകളുടെ തുടർച്ചയായ നീളം കുറഞ്ഞത് 100 മീറ്റർ നീളത്തിൽ സ g മ്യമായ ഗ്രേഡിയന്റ് ഉപയോഗിച്ച് വേർതിരിക്കേണ്ടതാണ് (അതായത് ഗ്രേഡിയന്റ് അല്ലെങ്കിൽ ആഹ്ലാദം പരിമിതപ്പെടുത്തുന്നു).
2 കിലോമീറ്റർ നീളത്തിൽ ഉയരത്തിൽ കയറുന്നത് പർവതപ്രദേശങ്ങളിൽ 100 മീറ്ററും കുത്തനെയുള്ള ഭൂപ്രദേശത്ത് 120 മീറ്ററും കവിയരുത്.
കായലിലെ അൺബെർഡ് നടപ്പാതകളിൽ, കൊടുങ്കാറ്റിലെ വെള്ളം ഒഴിക്കാൻ നടപ്പാതയ്ക്ക് മതിയായ കാംബർ ഉള്ളപ്പോൾ ലെവൽ ഗ്രേഡുകൾക്ക് എതിർപ്പില്ല.33
പാർശ്വസ്ഥമായി. എന്നിരുന്നാലും, കട്ട് സെക്ഷനുകളിൽ അല്ലെങ്കിൽ നടപ്പാതയിൽ നിയന്ത്രണങ്ങൾ ഏർപ്പെടുത്തിയിരിക്കുന്നിടത്ത്, കാര്യക്ഷമമായ ഡ്രെയിനേജ് ചെയ്യുന്നതിന് റോഡിന് കുറച്ച് ഗ്രേഡിയന്റ് ഉണ്ടായിരിക്കേണ്ടത് ആവശ്യമാണ്. സൈഡ് ഡ്രെയിനുകൾ നിരത്തിയാൽ 0.5 ശതമാനവും ഇവ അൺലൈൻ ചെയ്തിട്ടുണ്ടെങ്കിൽ 1.0 ശതമാനവുമാണ് ഈ ആവശ്യത്തിനായി ഏറ്റവും കുറഞ്ഞ ഗ്രേഡിയന്റ്.
തിരശ്ചീന വളവുകളിൽ, ഗ്രേഡിയന്റുകൾ ‘ഗ്രേഡ് കോമ്പൻസേഷൻ’ എന്നറിയപ്പെടുന്ന ഒരു തുക ഉപയോഗിച്ച് ലഘൂകരിക്കണം, ഇത് വളവുകളിൽ ഉൾപ്പെടുന്ന അധിക ട്രാക്ടീവ് പരിശ്രമം നികത്താൻ ഉദ്ദേശിച്ചുള്ളതാണ്. ഇനിപ്പറയുന്ന സൂത്രവാക്യത്തിൽ നിന്ന് ഇത് കണക്കാക്കണം:
ഗ്രേഡ് നഷ്ടപരിഹാരം (ശതമാനം) =
പരമാവധി 75 / R ന് വിധേയമായിആർ മീറ്ററിലെ വക്രത്തിന്റെ ആരം.
4 ശതമാനത്തിൽ കൂടുതൽ ആഹ്ലാദിക്കുന്ന ഗ്രേഡിയന്റുകൾക്ക് ഗ്രേഡ് നഷ്ടപരിഹാരം ആവശ്യമില്ലാത്തതിനാൽ, ഗ്രേഡ് നഷ്ടപരിഹാര തിരുത്തൽ പ്രയോഗിക്കുമ്പോൾ, ഗ്രേഡിയന്റുകൾ 4 ശതമാനത്തിനപ്പുറം ലഘൂകരിക്കേണ്ടതില്ല.
ഗ്രേഡ് മാറ്റങ്ങളിൽ സുഗമമായ പരിവർത്തനത്തിനായി ലംബ കർവുകൾ അവതരിപ്പിക്കുന്നു .. കോൺവെക്സ് ലംബ വളവുകളെ സമ്മിറ്റ് കർവുകൾ എന്നും കോൺകീവ് ലംബ കർവുകൾ വാലി അല്ലെങ്കിൽ സാഗ് കർവുകൾ എന്നും വിളിക്കുന്നു. ഇവ രണ്ടും സ്ക്വയർ പരാബോളകളായി രൂപകൽപ്പന ചെയ്യണം.
ലംബ വളവുകളുടെ ദൈർഘ്യം കാഴ്ച ദൂര ആവശ്യകതകളാൽ നിയന്ത്രിക്കപ്പെടുന്നു, പക്ഷേ കൂടുതൽ നീളമുള്ള കർവുകൾ സൗന്ദര്യാത്മകമാണ്.
പട്ടിക 20 ൽ സൂചിപ്പിച്ചിരിക്കുന്നതിലും കൂടുതലുള്ള എല്ലാ ഗ്രേഡ് മാറ്റങ്ങളിലും കർവുകൾ നൽകണം. തൃപ്തികരമായ രൂപത്തിന്, പട്ടികയിൽ കാണിച്ചിരിക്കുന്നതുപോലെ കുറഞ്ഞ ദൈർഘ്യം ഉണ്ടായിരിക്കണം.
| ഡിസൈൻ വേഗത (കിലോമീറ്റർ / മണിക്കൂർ) | പരമാവധി ഗ്രേഡ് മാറ്റം (ശതമാനം) ലംബമായ കർവ് ആവശ്യമില്ല | ലംബ വക്രത്തിന്റെ (മീറ്റർ) കുറഞ്ഞ നീളം |
|---|---|---|
| 35 വരെ | 1.5 | 15 |
| 40 | 1.2 | 20 |
| 50 | 1.0 | 30 |
| 65 | 0.8 | 40 |
| 80 | 0.6 | 50 |
| 100 | 0.5 | 6034 |
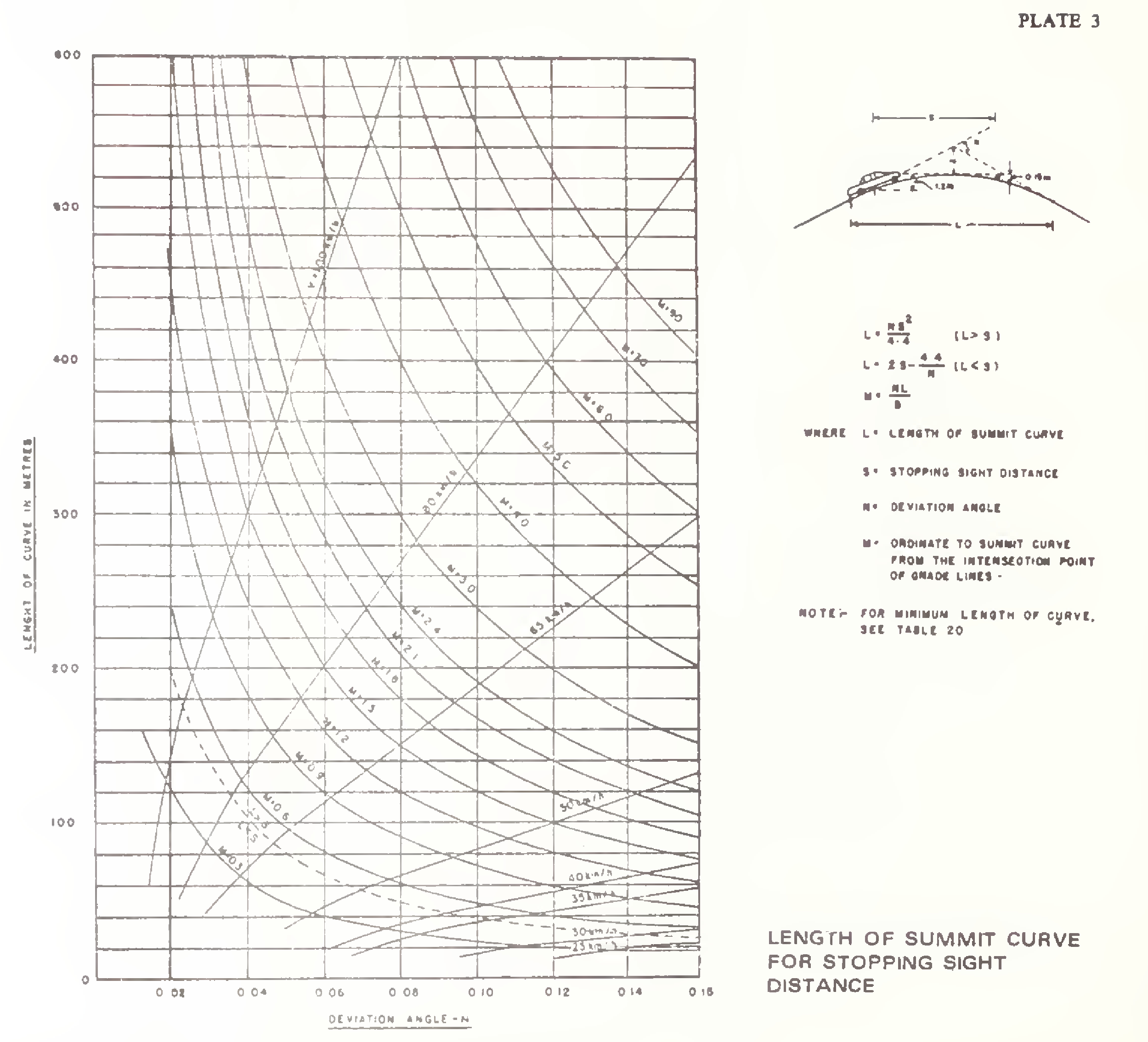
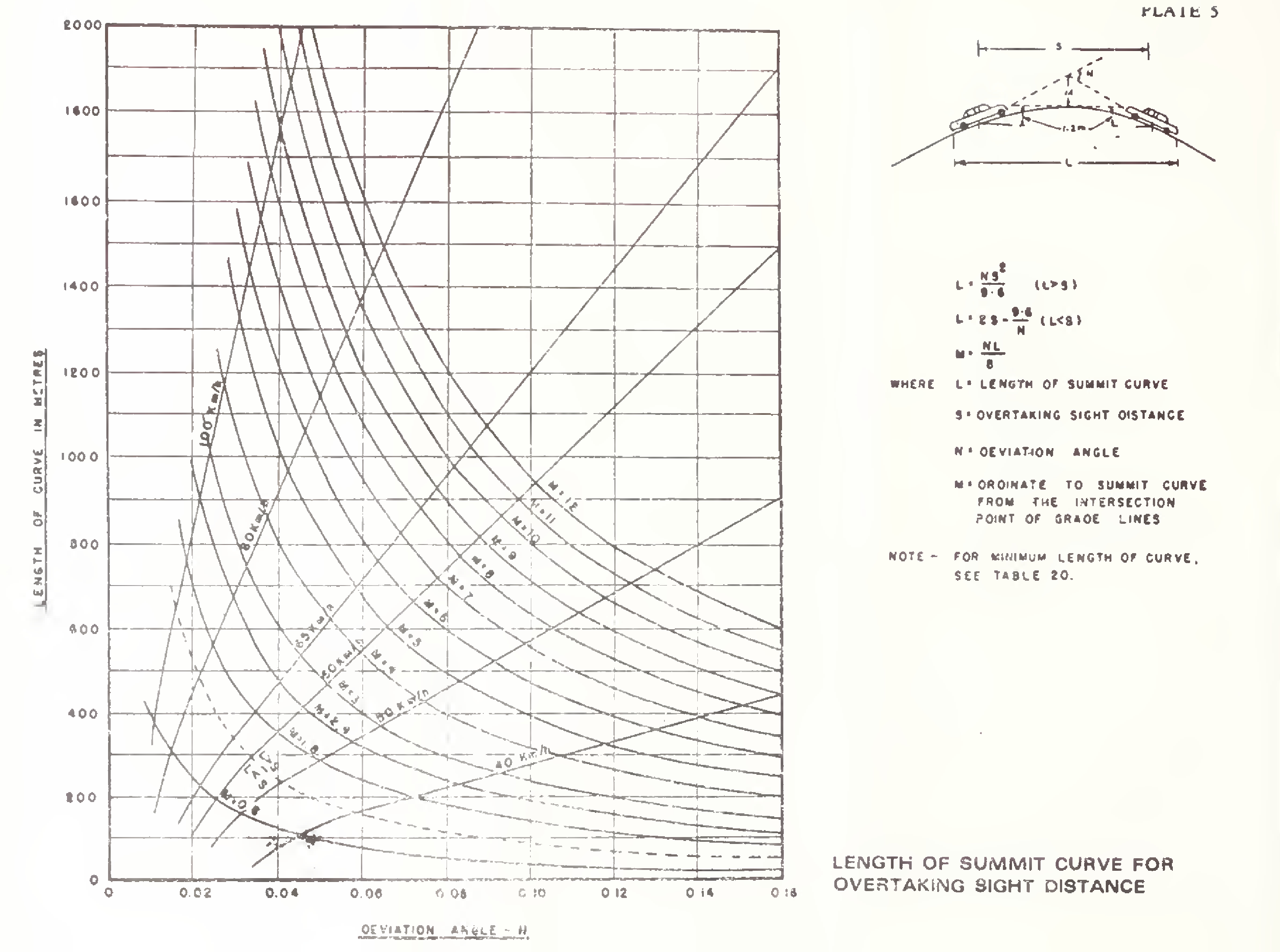
കാഴ്ചയുടെ ദൂരം തിരഞ്ഞെടുക്കുന്നതിലൂടെ ഉച്ചകോടി വളവുകളുടെ ദൈർഘ്യം നിയന്ത്രിക്കപ്പെടുന്നു. ഇനിപ്പറയുന്ന സൂത്രവാക്യങ്ങളുടെ അടിസ്ഥാനത്തിലാണ് നീളം കണക്കാക്കുന്നത്:
(എ)കാഴ്ചയുടെ ദൂരം സുരക്ഷിതമായി നിർത്തുന്നതിന്
കേസ് (i)വക്രത്തിന്റെ നീളം ആവശ്യമായ കാഴ്ച ദൂരം കവിയുമ്പോൾ, അതായത് L, S നേക്കാൾ വലുതാണ്
എവിടെഎൻ = ഡീവിയേഷൻ ആംഗിൾ, അതായത് രണ്ട് ഗ്രേഡുകൾ തമ്മിലുള്ള ബീജഗണിത വ്യത്യാസം
എൽ = മീറ്ററിലെ പരാബോളിക് ലംബ വക്രത്തിന്റെ നീളം
എസ് = മീറ്ററിലെ കാഴ്ച ദൂരം
കേസ് (ii)വക്രത്തിന്റെ നീളം ആവശ്യമായ കാഴ്ച ദൂരത്തേക്കാൾ കുറവാണെങ്കിൽ, അതായത് L, S നേക്കാൾ കുറവാണ്
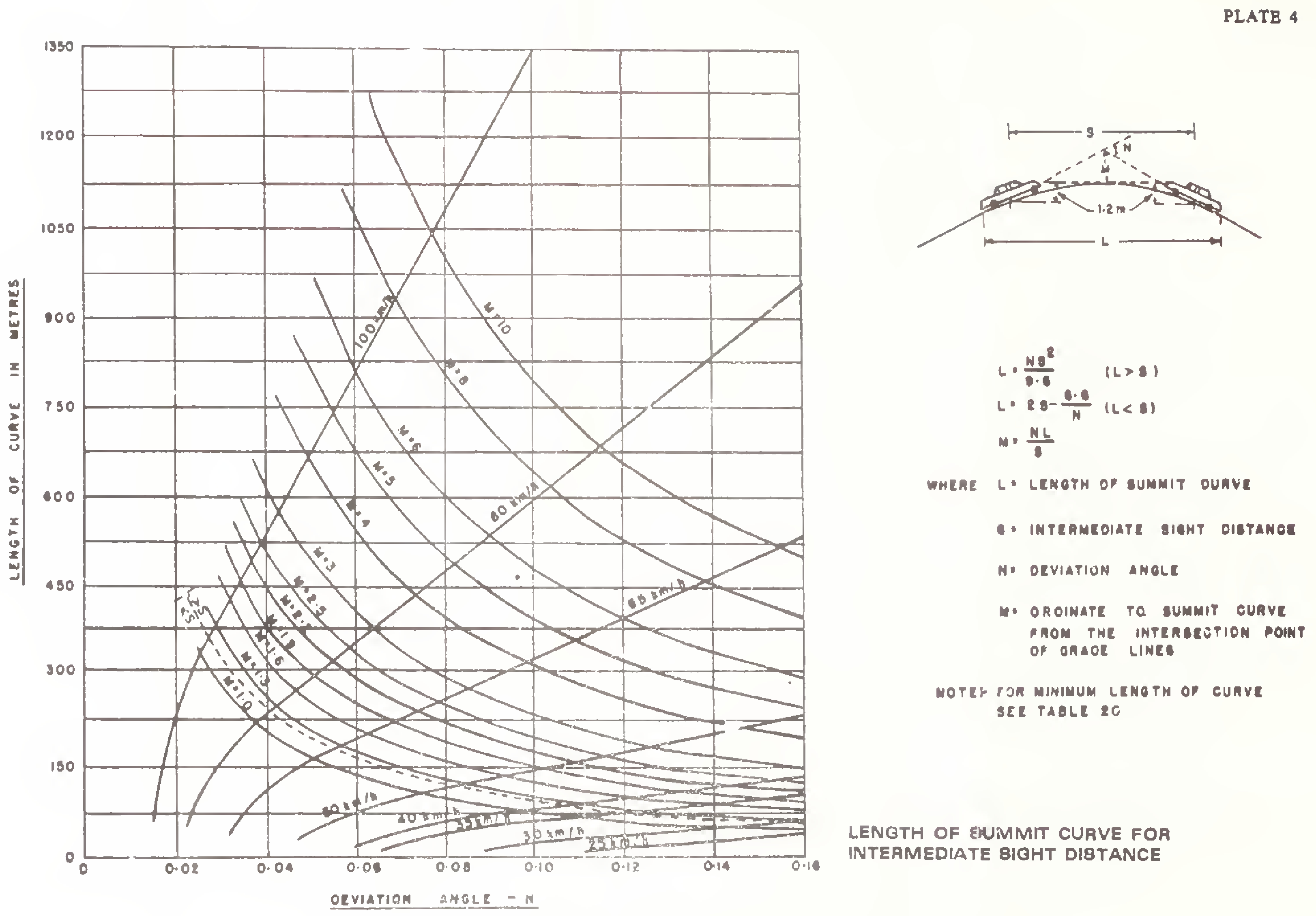
(ബി)കാഴ്ച ദൂരം ഇന്റർമീഡിയറ്റ് അല്ലെങ്കിൽ മറികടക്കുന്നതിന്
കേസ് (i)വക്രത്തിന്റെ നീളം ആവശ്യമായ കാഴ്ച ദൂരം കവിയുമ്പോൾ, അതായത് L, S നേക്കാൾ വലുതാണ്
കേസ് (ii)വക്രത്തിന്റെ നീളം ആവശ്യമായ കാഴ്ച ദൂരത്തേക്കാൾ കുറവാണെങ്കിൽ, അതായത് L, S നേക്കാൾ കുറവാണ്
മുകളിൽ സൂചിപ്പിച്ച വിവിധ കേസുകളുടെ ഉച്ചകോടി വളവിന്റെ ദൈർഘ്യം പ്ലേറ്റുകൾ 3, 4, 5 എന്നിവയിൽ നിന്ന് വായിക്കാം. ഈ പ്ലേറ്റുകളിൽ, ഓർഡിനേറ്റിന്റെ മൂല്യം “എം“ഗ്രേഡ് ലൈനുകളുടെ ഇന്റർസെക്ഷൻ പോയിന്റിൽ നിന്ന് വളവിലേക്ക് കാണിക്കുന്നു.
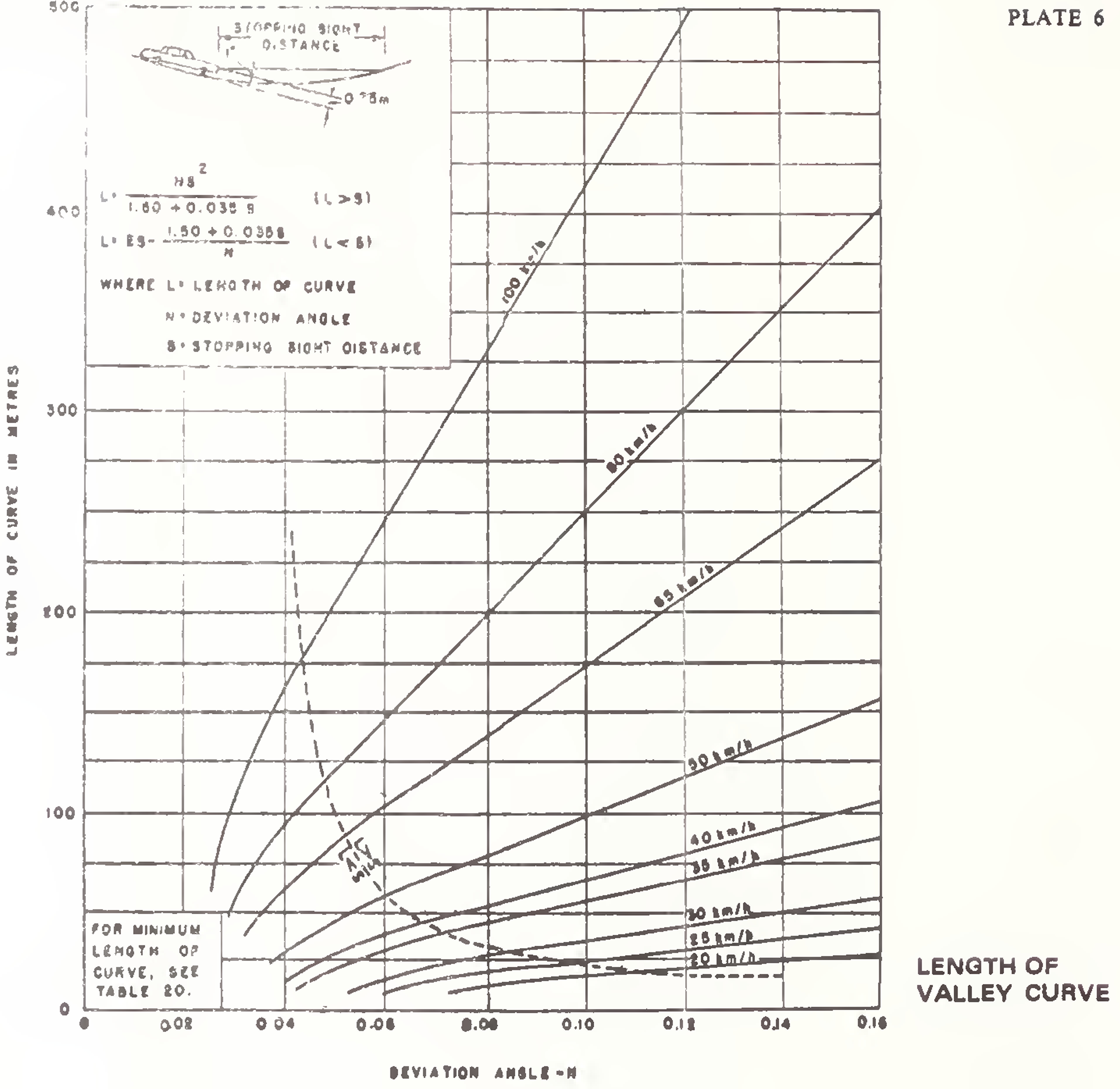
ന്റെ നീളം.വാലി വളവുകൾ രാത്രി യാത്രയ്ക്ക് ഹെഡ്ലൈറ്റ് ബീം ദൂരം തുല്യമാണ്. കാഴ്ച നിർത്തുന്നു35
ദൂരം. വക്രത്തിന്റെ നീളം ഇനിപ്പറയുന്ന പ്രകാരം കണക്കാക്കാം:
കേസ് (i)വക്രത്തിന്റെ നീളം ആവശ്യമായ കാഴ്ച ദൂരം കവിയുമ്പോൾ, അതായത് L, S നേക്കാൾ വലുതാണ്
കേസ് (ii)വക്രത്തിന്റെ നീളം ആവശ്യമായ കാഴ്ച ദൂരത്തേക്കാൾ കുറവാണെങ്കിൽ, അതായത് L, S നേക്കാൾ കുറവാണ്

രണ്ട് കേസുകളിലും
N = ഡീവിയേഷൻ ആംഗിൾ, അതായത് രണ്ട് ഗ്രേഡുകൾ തമ്മിലുള്ള ബീജഗണിത വ്യത്യാസം
എൽ = മീറ്ററിലെ പരാബോളിക് ലംബ വക്രത്തിന്റെ നീളം
എസ് = മീറ്ററിൽ കാഴ്ച ദൂരം നിർത്തുന്നു
വിവിധ ഗ്രേഡ് വ്യത്യാസങ്ങൾക്കുള്ള വാലി കർവിന്റെ ദൈർഘ്യം പ്ലേറ്റ് 6 ൽ ഗ്രാഫിക്കൽ രൂപത്തിൽ നൽകിയിരിക്കുന്നു.
ഒഴിവാക്കാനാവാത്തയിടത്ത് ഹെയർ-പിൻ വളവുകൾ ഓരോ അറ്റത്തും സംക്രമണത്തോടുകൂടിയ വൃത്താകൃതിയിലുള്ള വക്രമായി രൂപകൽപ്പന ചെയ്യാം, അല്ലെങ്കിൽ as ഒരു സംയുക്ത വൃത്താകൃതിയിലുള്ള വക്രം. അവയുടെ രൂപകൽപ്പനയ്ക്കായി ഇനിപ്പറയുന്ന മാനദണ്ഡങ്ങൾ സാധാരണയായി പാലിക്കണം:
| (എ) | കുറഞ്ഞ ഡിസൈൻ വേഗത | ... | മണിക്കൂറിൽ 20 കിലോമീറ്റർ |
| (ബി) | ഏറ്റവും കുറഞ്ഞ റോഡ്വേ വീതി | ||
| (i) ദേശീയ / സംസ്ഥാന ഹൈവേകൾ | ... | ഇരട്ട പാതയ്ക്ക് 11.5 മീ സിംഗിൾ ലെയ്നിന് 9.0 മീ |
|
| (ii) പ്രധാന ജില്ലാ റോഡുകളും മറ്റ് ജില്ലാ റോഡുകളും | ... | 7.5 മീ | |
| (iii) ഗ്രാമ റോഡുകൾ | ... | 6.5 മീ | |
| (സി) | ആന്തരിക വളവിന് കുറഞ്ഞ ദൂരം | ... | 14.0 മീ |
| (d) | സംക്രമണ വക്രത്തിന്റെ കുറഞ്ഞ നീളം | ... | 15.0 മീ |
| (ഇ) | ഗ്രേഡിയന്റ് | ||
| പരമാവധി | ... | 40 ൽ 1 (2.5 ശതമാനം) | |
| കുറഞ്ഞത് | ... | 200 ൽ 1 (0.5 ശതമാനം) | |
| (എഫ്) | സൂപ്പർലീവേഷൻ | ... | 10 ൽ 1 (10 ശതമാനം) |
നടപ്പാതയുടെ മധ്യരേഖയുമായി ബന്ധപ്പെട്ട് റോഡ്വേയുടെ അകത്തെയും പുറത്തെയും അറ്റങ്ങൾ കേന്ദ്രീകൃതമായിരിക്കണം. എവിടെ ഒരു36
ഹെയർ-പിൻ എണ്ണം. വളവുകൾ അവതരിപ്പിക്കേണ്ടതുണ്ട്, വിന്യാസം സുഗമമായി ചർച്ച ചെയ്യുന്നതിന് ഡ്രൈവറെ പ്രാപ്തമാക്കുന്നതിന് തുടർച്ചയായ വളവുകൾക്കിടയിൽ കുറഞ്ഞത് 60 മീറ്റർ ദൂരം നൽകണം.
ഹെയർ-പിൻ വളവുകൾ വിശാലമാക്കുന്നത് പിന്നീട് ബുദ്ധിമുട്ടുള്ളതും ചെലവേറിയതുമായ പ്രക്രിയയാണ്. മലനിരകൾ മുറിച്ചുകൊണ്ട് മാത്രമേ വീതികൂട്ടാൻ കഴിയൂ എന്നതിനാൽ ഗ്രേഡിയന്റുകൾ മൂർച്ചയുള്ളതായി മാറുന്നു. ആസൂത്രണ ഘട്ടത്തിൽ ഈ പോയിന്റുകൾ കണക്കിലെടുക്കണം, പ്രത്യേകിച്ചും ഹെയർ-പിൻ വളവുകളുടെ ഒരു ശ്രേണി ഉൾപ്പെട്ടിട്ടുണ്ടെങ്കിൽ.
ഹെയർ-പിൻ വളവുകളിൽ, റോഡ്വേയുടെ മുഴുവൻ വീതിയും ദൃശ്യമാകണം.
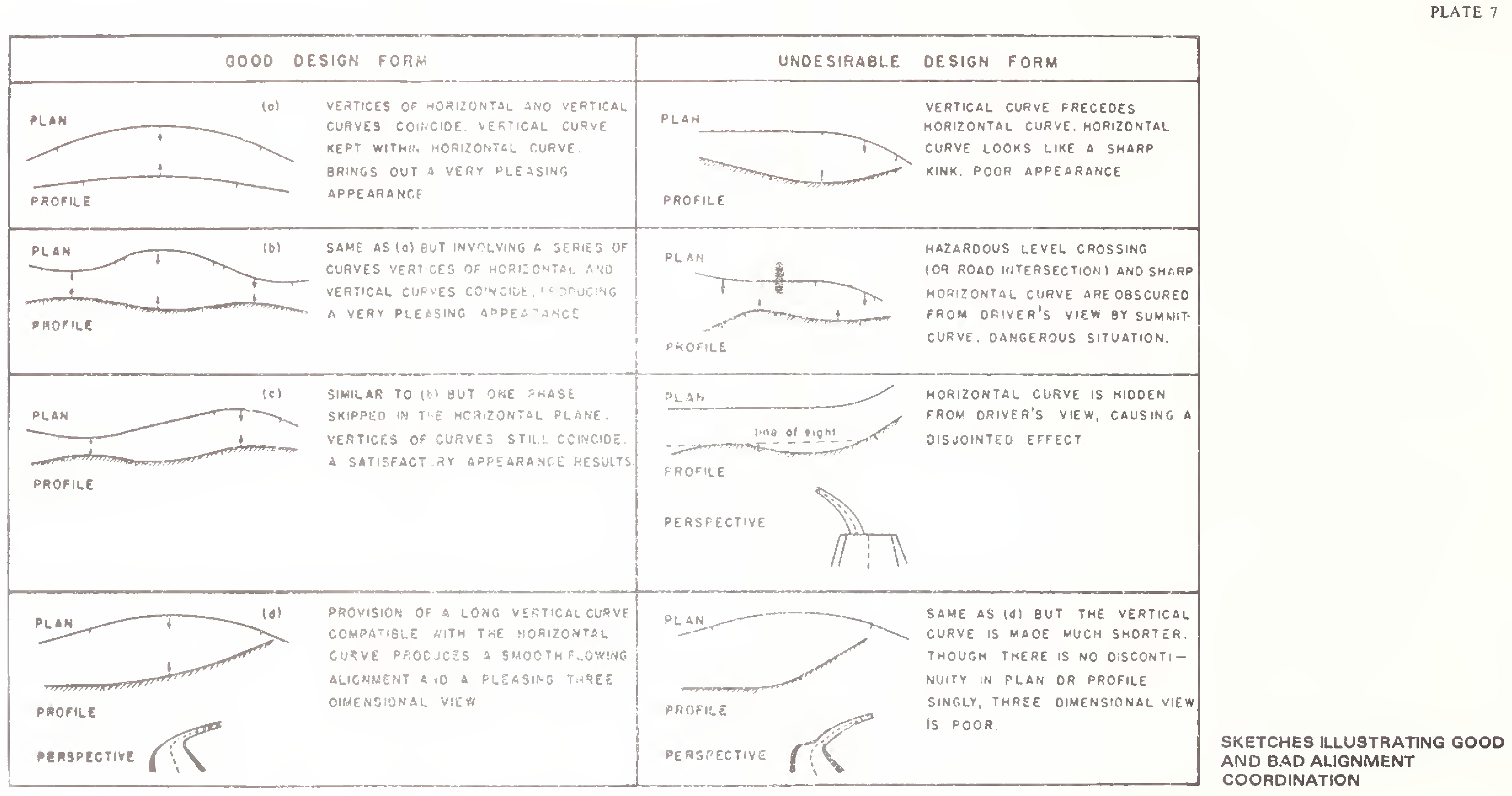
തിരശ്ചീനവും ലംബവുമായ വിന്യാസങ്ങളുടെ വിവേകപൂർണ്ണമായ സംയോജനത്തിലൂടെ ഒരു ദേശീയപാതയുടെ മൊത്തത്തിലുള്ള രൂപം ഗണ്യമായി വർദ്ധിപ്പിക്കാൻ കഴിയും. റോഡിന്റെ പ്ലാനും പ്രൊഫൈലും സ്വതന്ത്രമായി രൂപകൽപ്പന ചെയ്യരുത്, മറിച്ച് ഉചിതമായ ത്രിമാന പ്രഭാവം സൃഷ്ടിക്കുന്നതിനായി ഏകീകൃതമായി രൂപകൽപ്പന ചെയ്യരുത്. ഇക്കാര്യത്തിൽ ശരിയായ ഏകോപനം സുരക്ഷ ഉറപ്പാക്കുകയും ദേശീയപാതയുടെ ഉപയോഗം മെച്ചപ്പെടുത്തുകയും മൊത്തത്തിലുള്ള സൗന്ദര്യശാസ്ത്രത്തിന് സംഭാവന നൽകുകയും ചെയ്യും.
വക്രതയുടെ അളവ് ഗ്രേഡിയന്റുകളുമായി ശരിയായ സന്തുലിതമായിരിക്കണം. കുത്തനെയുള്ളതോ നീളമുള്ളതോ ആയ ഗ്രേഡുകളുടെ ചെലവിൽ നേരായ വിന്യാസം അല്ലെങ്കിൽ പരന്ന തിരശ്ചീന വളവുകൾ, അല്ലെങ്കിൽ ഫ്ലാറ്റ് ഗ്രേഡുകളുള്ള ഒരു റോഡിൽ അമിതമായ വക്രത, സമതുലിതമായ രൂപകൽപ്പനകളല്ല, അവ ഒഴിവാക്കണം.
തിരശ്ചീന വക്രതയിൽ സൂപ്പർപോസ് ചെയ്ത ലംബ വക്രത മനോഹരമായ ഒരു പ്രഭാവം നൽകുന്നു. ലംബവും തിരശ്ചീനവുമായ വളവുകൾ കഴിയുന്നിടത്തോളം യോജിക്കുകയും അവയുടെ നീളം കൂടുതലോ കുറവോ ആയിരിക്കുകയും വേണം. ഏതെങ്കിലും കാരണത്താൽ ഇത് ബുദ്ധിമുട്ടാണെങ്കിൽ, തിരശ്ചീന വക്രം ലംബ വക്രത്തേക്കാൾ അല്പം നീളമുള്ളതായിരിക്കണം.
മൂർച്ചയേറിയ തിരശ്ചീന വളവുകൾ സുരക്ഷാ പരിഗണനകളിൽ നിന്ന് ഉച്ചരിച്ച ഉച്ചകോടി / സാഗ് ലംബ വളവുകളുടെ അഗ്രത്തിനടുത്തോ സമീപത്തോ ഒഴിവാക്കണം.
നല്ലതും ചീത്തയുമായ വിന്യാസ ഏകോപനത്തിന്റെ ചില സാധാരണ കേസുകൾ പ്ലേറ്റ് 7 വിശദീകരിക്കുന്നു.
ലാറ്ററൽ ക്ലിയറൻസ്
സമീപനങ്ങളിലെ മുഴുവൻ റോഡ്വേ വീതിയും അണ്ടർപാസ് വഴി കൊണ്ടുപോകണം. ഇത് സൂചിപ്പിക്കുന്നത്37
മിനിമം ലാറ്ററൽ ക്ലിയറൻസ് (അതായത്, വണ്ടിയുടെ അങ്ങേയറ്റത്തെ അരികും ഏറ്റവും അടുത്തുള്ള പിന്തുണയുടെ മുഖവും തമ്മിലുള്ള ദൂരം, സോളിഡ് അബുട്ട്മെന്റ്, പിയർ അല്ലെങ്കിൽ കോളം) സാധാരണ തോളിൻറെ വീതിക്ക് തുല്യമായിരിക്കണം.
താരതമ്യേന ഇടുങ്ങിയ തോളുകളുള്ള മലയോര പ്രദേശങ്ങളിലെ താഴ്ന്ന കാറ്റഗറി റോഡുകളിൽ, ഖണ്ഡിക 6.3 കണക്കിലെടുത്ത് അണ്ടർപാസുകളിൽ റോഡ്വേ വീതി ഒരു പരിധി വരെ വർദ്ധിപ്പിക്കുന്നത് അഭികാമ്യമാണ്. ഒപ്പം തത്ത്വങ്ങളുംIRC: 54-1974 “വാഹന ഗതാഗതത്തിനായുള്ള അണ്ടർപാസുകളിൽ ലാറ്ററൽ, ലംബ അനുമതികൾ”
ഇരട്ട കാരിയേജ്വേ റോഡുകളിലെ അഭികാമ്യമായ ലാറ്ററൽ ക്ലിയറൻസിനായി, റഫറൻസ് നൽകാംIRC: 54-1974.
അണ്ടർപാസുകളിൽ ലംബ ക്ലിയറൻസ് കുറഞ്ഞത് ആയിരിക്കണം5 ഭാവിയിൽ അണ്ടർപാസ് റോഡ്വേയുടെ ഉയർത്തൽ / സ്ട്രെംഗ്-തിന്നിംഗ് എന്നിവയ്ക്ക് ഉചിതമായ അലവൻസ് നൽകിയതിന് ശേഷം മീറ്റർ.38